 Nikhil Mishra
Nikhil MishraFiltering Techniques:
Inbuilt IIR (Infinite Impulse Response)

With Different osrs_p settings (fig 1) y-axis (height in m)
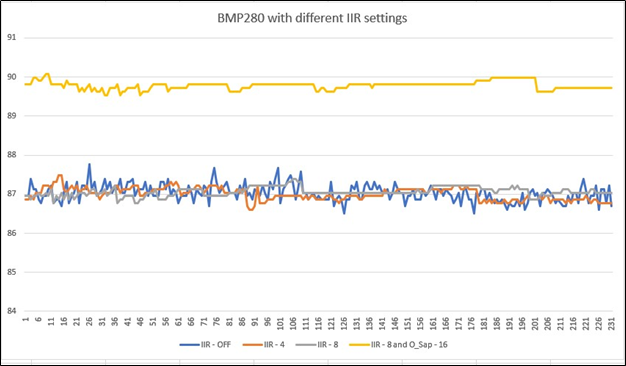
With Different IIR settings (fig 2)
In fig(1), it's clear that oversampling of 10 or more is helpful. Can you make any other analysis from this?
In Fig(2), IIR (8) is doing some aggressive filtering. But it's still not perfect. Might need to use a filter.
Kalman Filter (1 - Var)
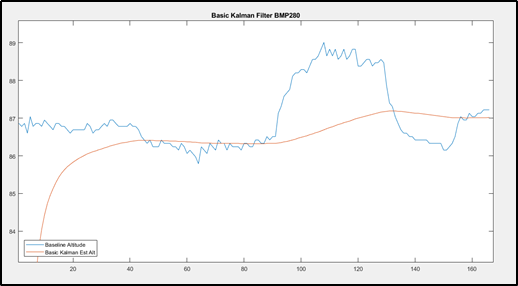
Kalman Filter is one challenging thing to get it perfect.
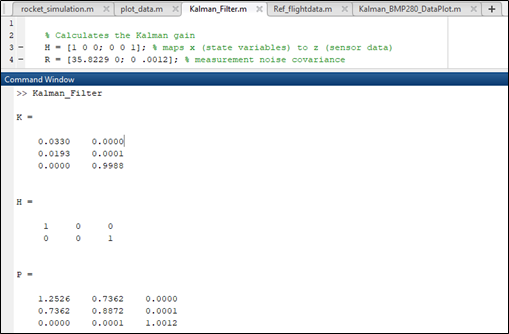
Kalman Gain Vals
Testing the BMP280
Set up a vacuum chamber to test it. In fact, initial testing you could probably do with the BMP280 just placed in the hose or coupling of a vacuum cleaner. That is the method I started with to test altimeters. From there I just moved to a small cardboard box and a vacuum cleaner.
Accuracy
As for accuracy, both pressure and temperature the BMP280 is really good. The pressure accuracy, when temperature correct, falls to below the resolution. It reads down to 1nPa, so the reading accuracy is going to be +/- .16hPa, roughly +/- 1 meter at sea level. Temp is +/- .5°C. This is an amazingly accurate sensor, especially for the price.
Overall accuracy of the altimeter depends on several factors and is not that easy to measure. Unless you have access to pressure standards, it is better to measure correlation with another altimeter. Any of the commercial recording altimeters will work, if you have one. I tend to check two or three at a time, and generally get somewhere between 2% an 5% correlation. That is the high and low will be within 2 to 5 percent of each other for apogee reading. Obviously, a quick function check and not a serious calibration with NIST traceability.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.