 nh8157
nh8157Introduction
The ability of perceiving surrounding environment, especially other robots among individual robots is the key for the swarm group to take action collectively.
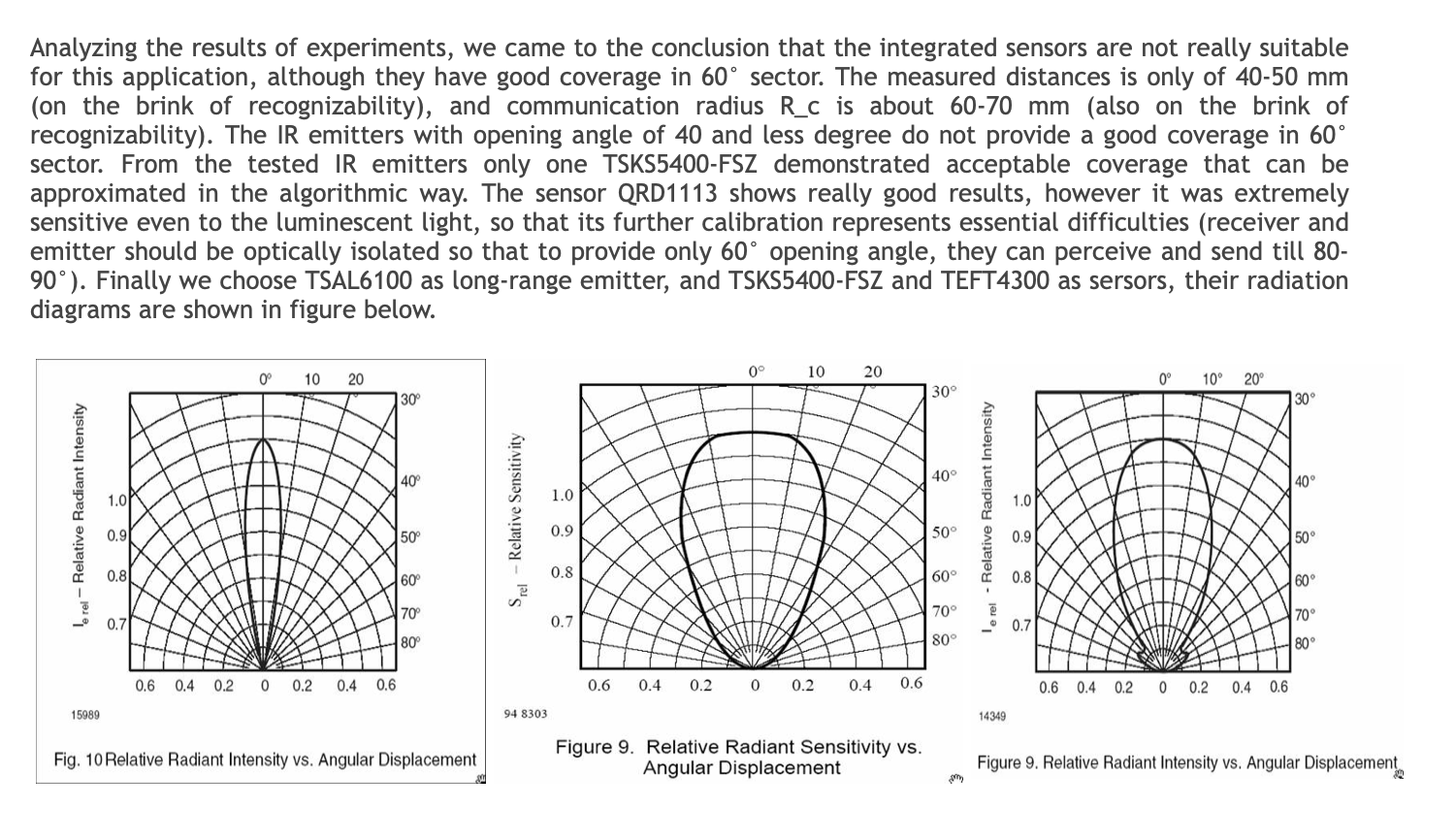
Just as many other swarm robotics program, we have attempted using the IR to accomplish the task. Ideally, one emitter on one robots would send infrared signal constantly, and another robots would receive the infrared signal from other robots and determine the distance between them based on the intensity of the infrared signal.
Implementation
However, as the Jasmine team has discovered, with relatively low density of IR receivers, the intensity of infrared signal another robot receive would become a petal.
In other words, with infrared signal shooting at the middle of two receivers or directly at one receiver from the same distance, the intensity would differentiate, where the one shooting at the middle of two receivers would decrease dramatically.
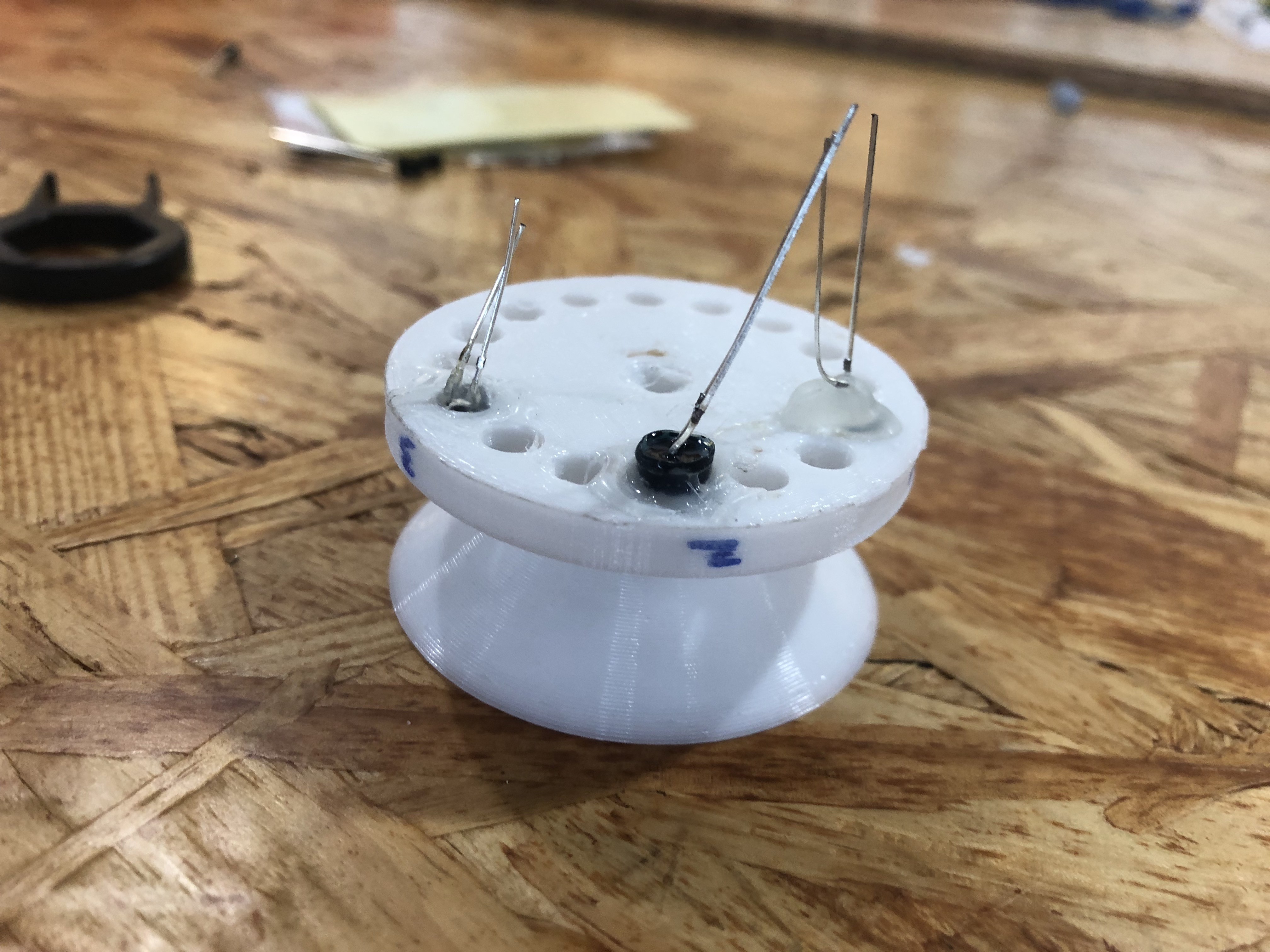
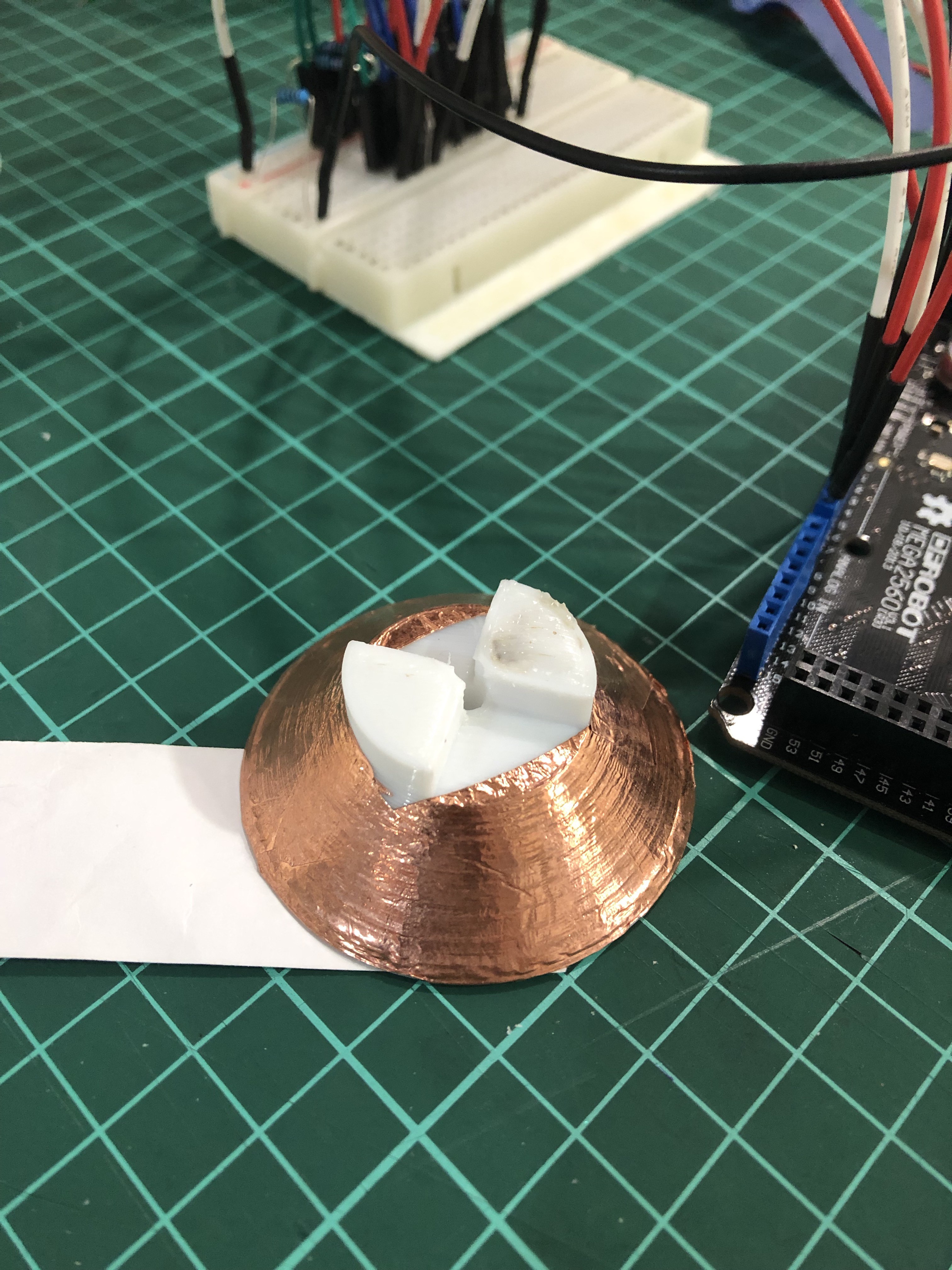
To better address this issue, we thought of using a cone, where diffuse reflection would occur at its surface, through which even the infrared is shooting at the middle of two receivers, the light would also reflect and enable the receivers to receive equal value of infrared.
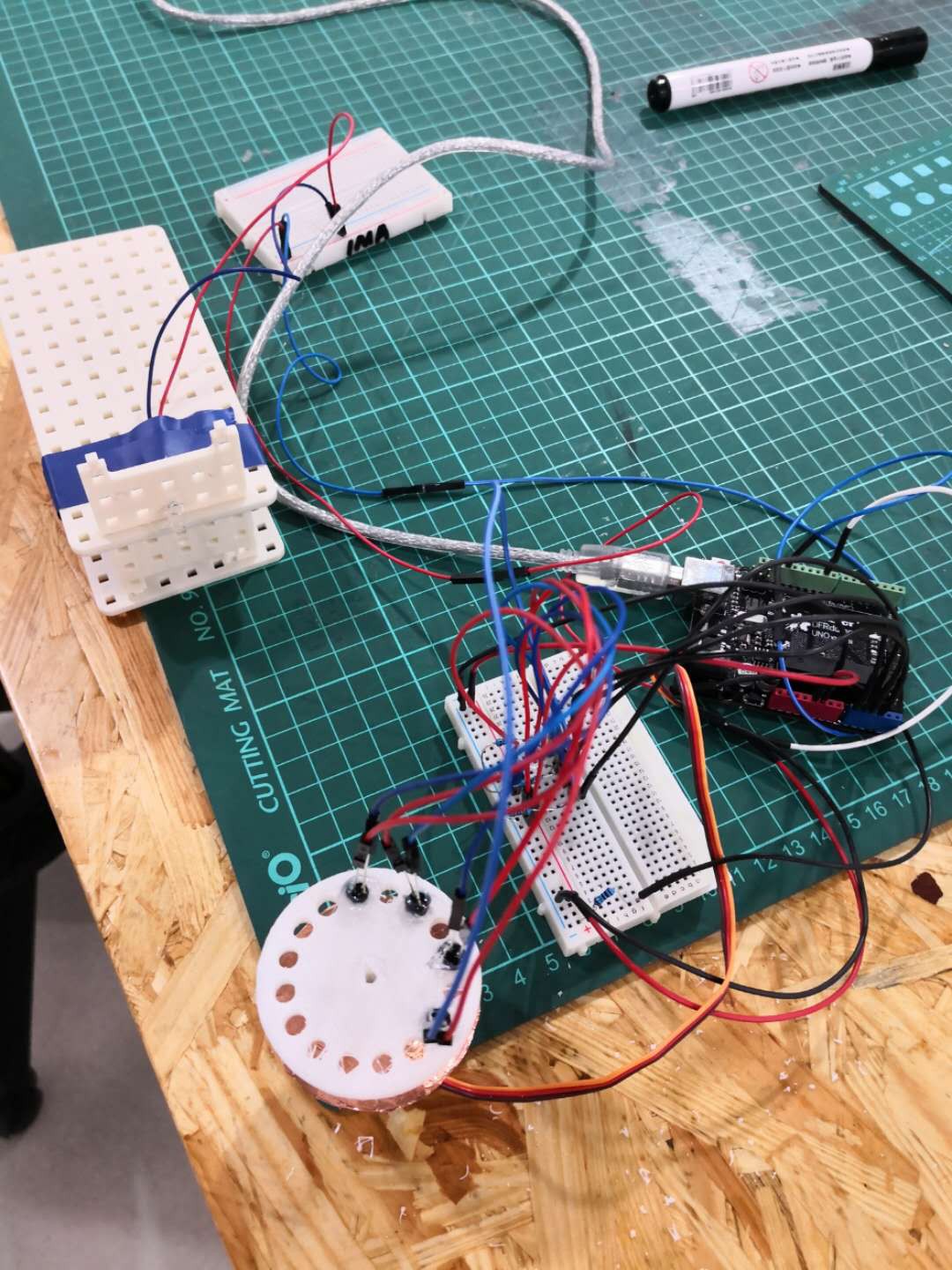
To better reflect the test result, we combined Arduino and Processing, where the Arduino would read the intensity of infrared using analog input and send the values to Processing. The Processing would in turn draw an infrared intensity map based on the value sent from the Arduino, while saving all the data in a text file.
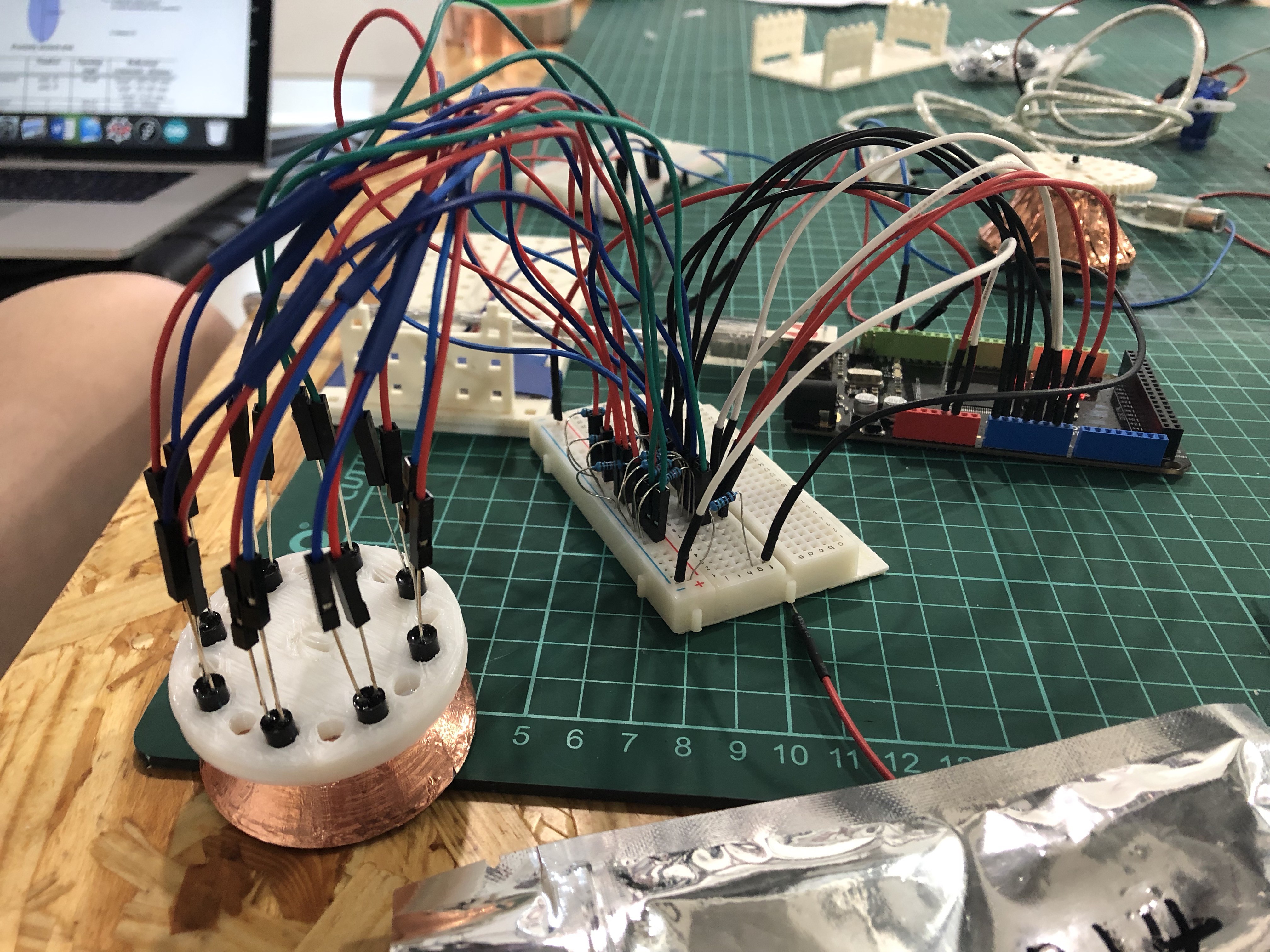
As shown in the video below, in the pilot test, we only used four receivers. The result of the test, however, doesn't seem satisfying. Though the blind spot between two receivers has shrunk thanks to the design, the reduction in IR intensity still exists.
Initially, we thought it is resulted from the surface of the cone being not smooth and reflective enough. So we put conductive tape, assuming that it would improve the readings.
We also increased the density of IR receivers by decreasing the included angle between two neighboring receivers to 45 degrees.
Though the range of detecting infrared signal has greatly increased, the peak value among different IR receivers vary, which might be the result of not even surface of the tape. After taping the cone evenly, the situation has improved.
This also led to another problem. Within the range of 5 - 25cm, there would only be minor decrease in the infrared intensity as the emitter moves away from the receiver, which might undermine the precision in positioning.
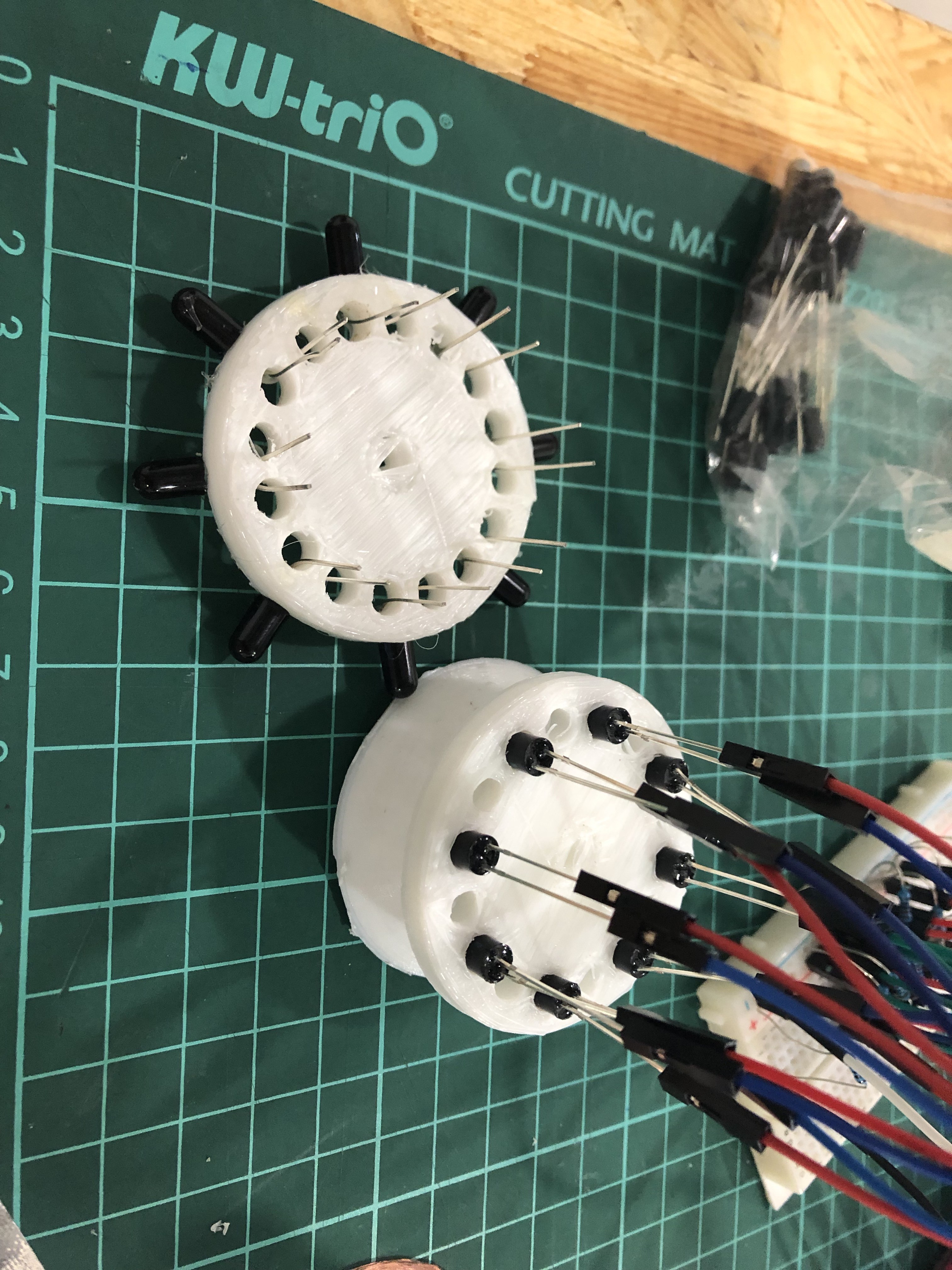
When we were about to be defeated by the results, we put 8 receivers and tested it.
The result turned out to be very promising, as when the infrared red signal shoots right at the middle of two receivers, the value of intensity won't change so dramatically.
What's even more exciting is after removing the conductive tape, the feature mentioned above would persist, the capacity of estimating the distance based on the range would greatly improve.
Backup Plan
Our backup plan, the Sunflower plan, is to use the same type of design in Jasmine.
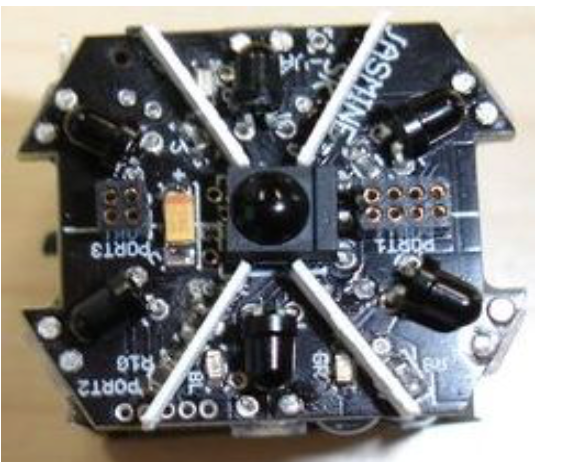
(The one on the left)
The final data, as we expected, shows a very obvious blind spot between two neighboring receivers.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.