 tyeetyee
tyeetyeeAfter seeing that the chassis that we were initially using was not extremely customizable (as well as hard to dissemble and reassemble), we raided our robotics room to see if there were any alternatives. Fortunately, we have boxes and boxes of grid like plastic parts which we can assemble almost like legos. With this, we had a very simple structure for now that is easy to assemble, attach things onto, and have enough space for more. We will get back to this design later, especially since the front wheel placement is messing up sometimes the direction the robot goes using its back motors.
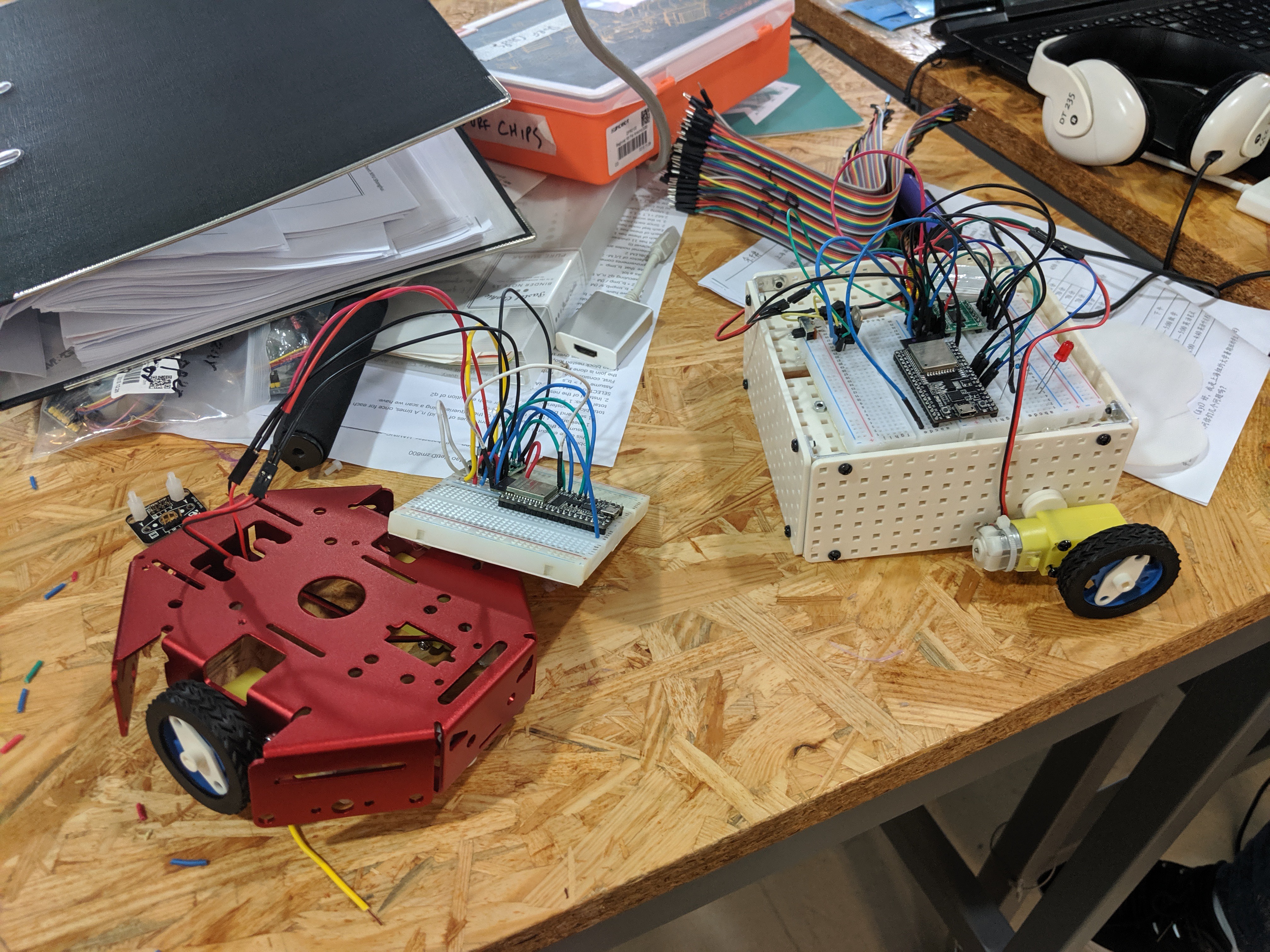
For now, we are also trying to find a way to position the robot based on its angle and turn correctly.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.