 Xabi Z
Xabi ZIn old times placing a phone call required a much more deeper link with the machine. In the case of rotary phones it even required to put your finger inside the holes of the dial wheel. With the touchscreens of nowadays smartphones -and even voice-dialing in some cases- the art of telephoning has come to a colder, feeling-less age. But what if we could combine the look and feel of vintage phones with the current telecommunication advances?
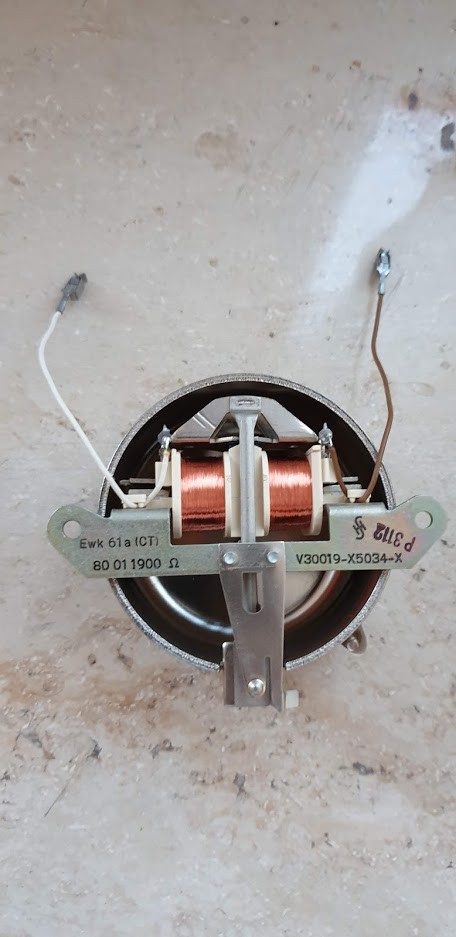
This project started when I acquired yet another piece of old technology, frozen witness of ages gone by: An old German post-telephone from the 80s.
The source code for a functional Python client is hosted in this GitHub repository. Feel free to use it, comment, and contribute!

/Year_5/ELC-523-Advanced%20Communication%20Systems/Telephone_Instruments/Images/Pulse_Train.GIF)









 alex
alex
 Ben Jacobs
Ben Jacobs
 Maciej Witkowiak
Maciej Witkowiak
 tdicola
tdicola
This is awesome! I bought a rotary dial phone (german one too) last year but didnt manage to get it to work. This will definitly help! I will include a powerbank oder 18650 lithium battery to keep it mobile. I was thinking about the ringing generator. Would it be an idea to switch a mosfet from the pi zero and connect a small transformer to transform 5v from the powerbank to maybe 40v AC?