 Tim Wilkinson
Tim Wilkinson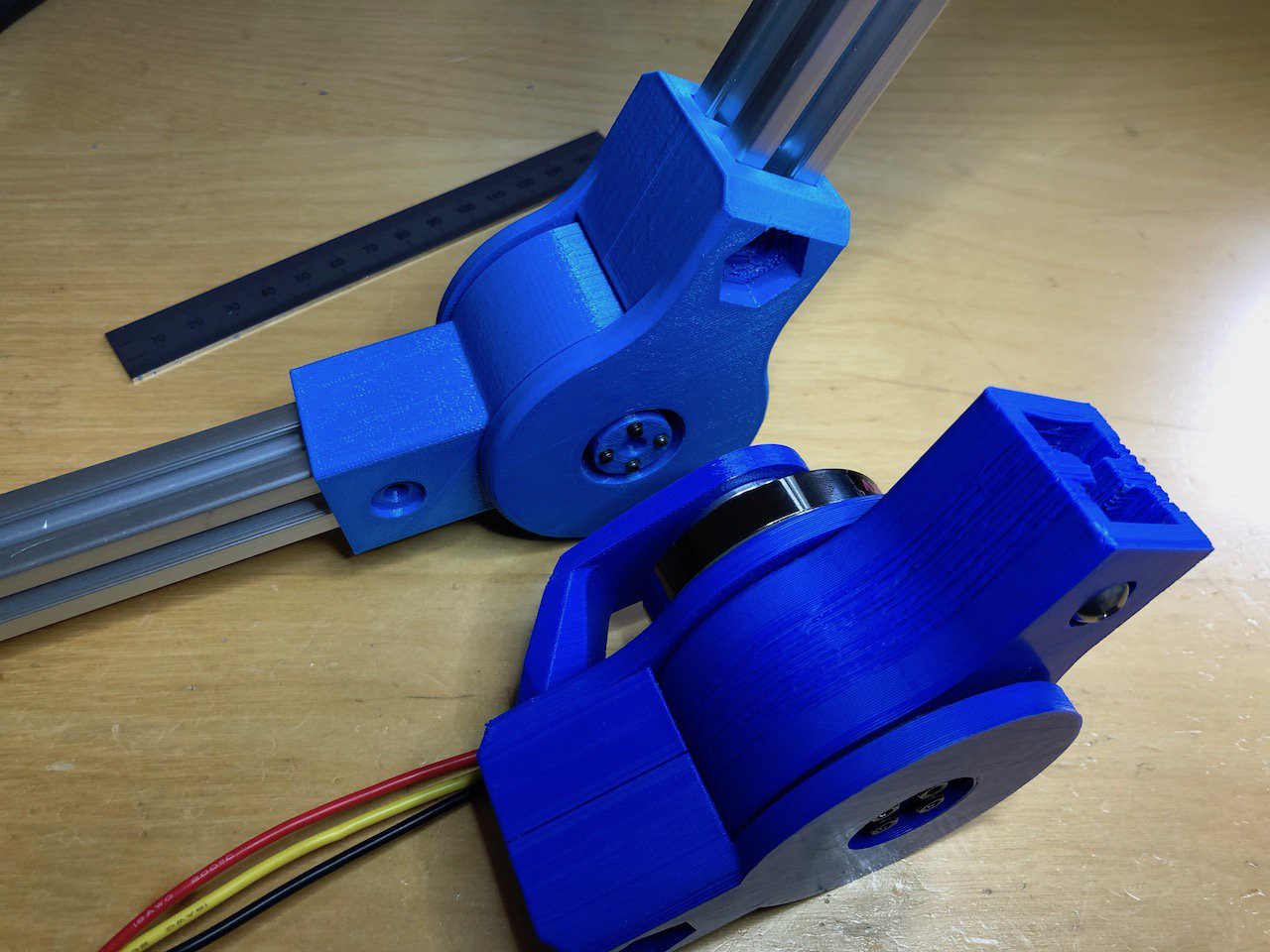 Perhaps unsurprisingly, the joint printed in PET (light blue) is much smoother than the joint printed in PLA (dark blue) - and the blue PET PRO from Matterhackers is rather nice. I've mostly been prototyping in PLA because is easy to use, but it clearly wears quickly and heats up when testing (and PLA doesn't do well when it gets hot). The joint is also easier to back drive, which is a property I hope to use to measure the load on the motor in order to provide compliance.
Perhaps unsurprisingly, the joint printed in PET (light blue) is much smoother than the joint printed in PLA (dark blue) - and the blue PET PRO from Matterhackers is rather nice. I've mostly been prototyping in PLA because is easy to use, but it clearly wears quickly and heats up when testing (and PLA doesn't do well when it gets hot). The joint is also easier to back drive, which is a property I hope to use to measure the load on the motor in order to provide compliance.I'm still tweaking the dimensions of the various parts for the best compromise of fit and tolerance - it's something to obsess over while I wait for the position encoders to turn up.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.