 Tim Wilkinson
Tim WilkinsonJust uploaded the STL to print one robot joint. Assembly instructions to follow as soon as I finish writing them.
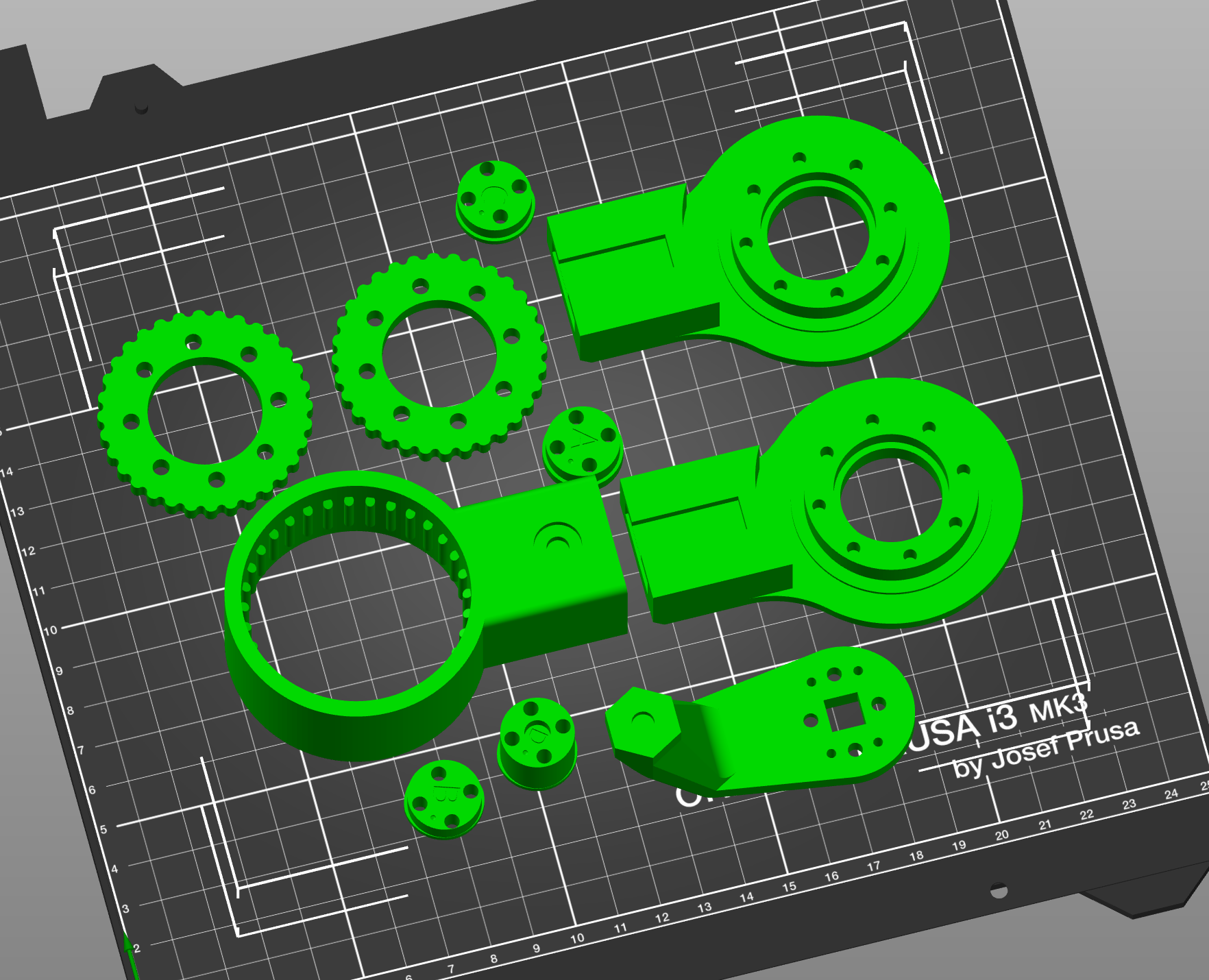
A project log for 3D Printed Robot Joint with Active Compliance
A general purpose robot joint using a cycloidal gearbox and an ODrive modified to support active compliance
Just uploaded the STL to print one robot joint. Assembly instructions to follow as soon as I finish writing them.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.