 Leo Vu
Leo VuThe current specs of the robot is:
Estimated weight: 12.612 kg.
Maximum reach: 730 mm.
Estimated payload: 1 kg.
Virtual simulation using Matlab and RoboAnalyzer.
An attempt to design and build a 3D printable 6 axis robot that meets the industrial standard.
Already have an account? Log in.
To make the experience fit your profile, pick a username and tell us what interests you.
The current specs of the robot is:
Estimated weight: 12.612 kg.
Maximum reach: 730 mm.
Estimated payload: 1 kg.
Virtual simulation using Matlab and RoboAnalyzer.
|
stp - 39.58 MB - 05/21/2019 at 19:16 |
|
I attempted to build a simulation of the robot, and eventually the controller software in Matlab. The goal is to make all of the computations as modular as possible by using symbols from DH Parameters where possible.
The current working modules (or functions) are:
Generalised Forward Kinematics using DH Parameters.
Generalised Inverse Kinematics using DH Parameters.
Trajectory planning Linear and Arc (for G01 and G02 GCODE).
Scrap GCODE parser.
Generalised Jacobian calculation and inverse Jacobian calculation (closed form solution).
The simulation uses RoboAnalyzer VRM at http://www.roboanalyzer.com/vrm-rtb.html. This helps to accelerate the testing as the graphics in Matlab is very slow.
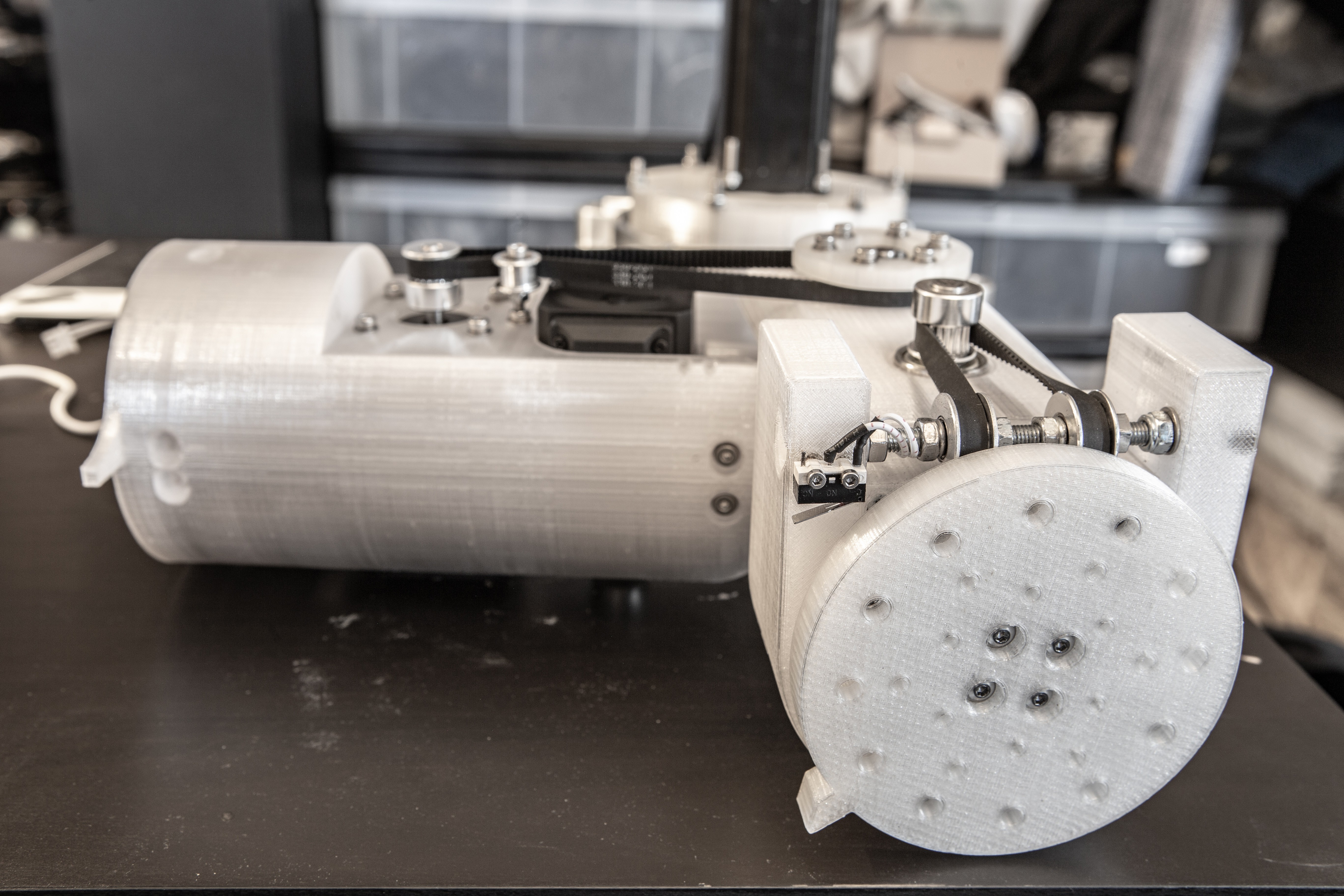
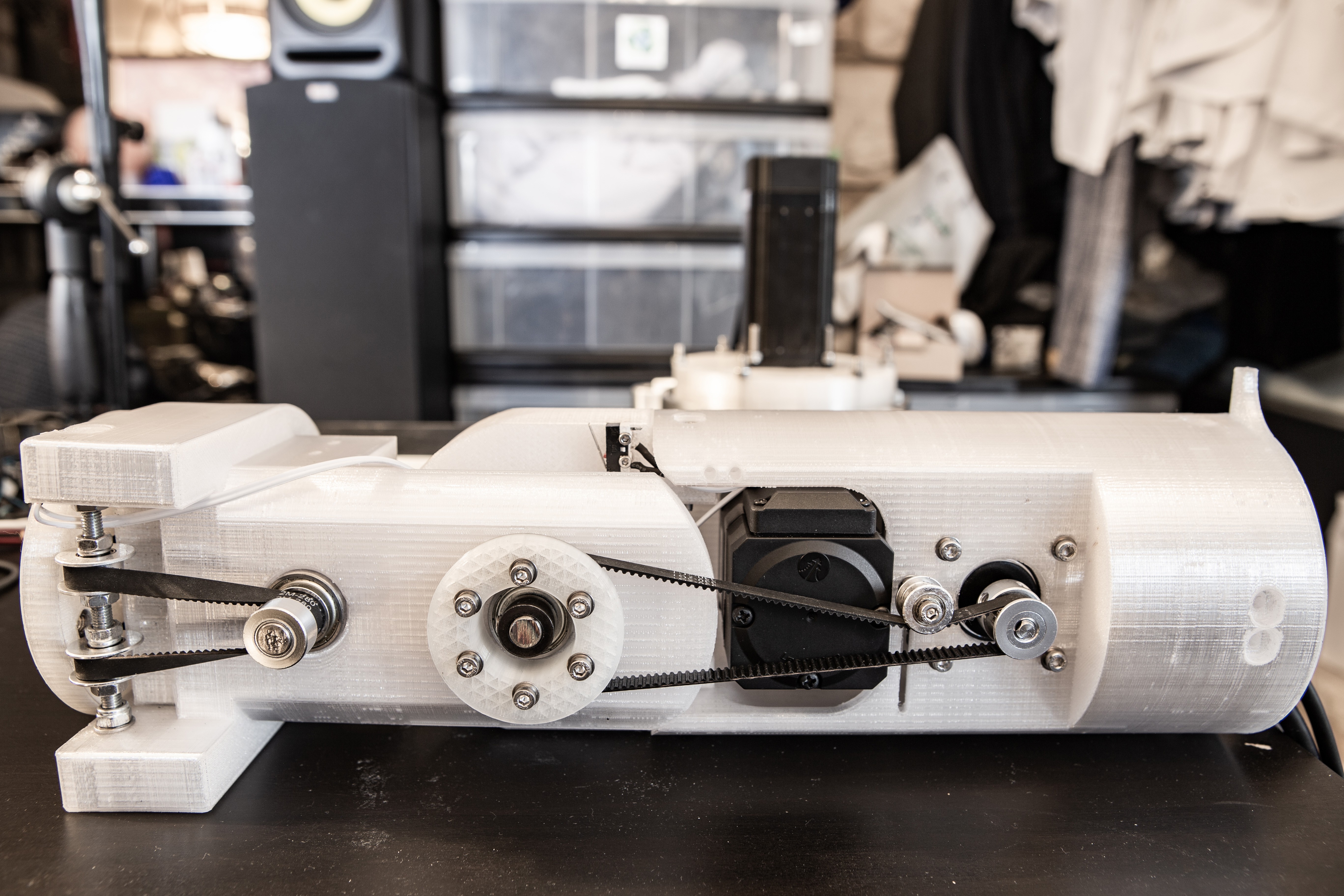
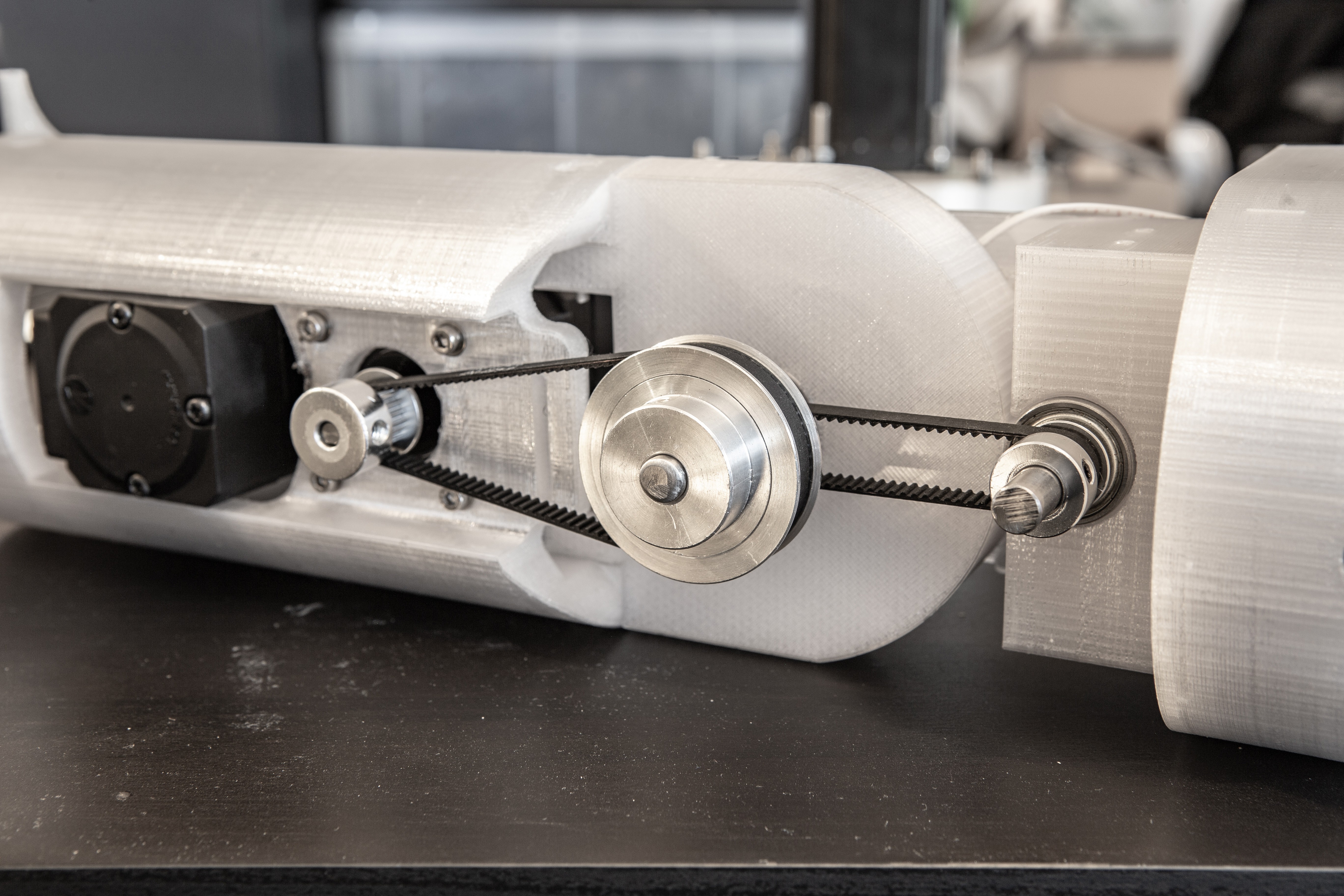
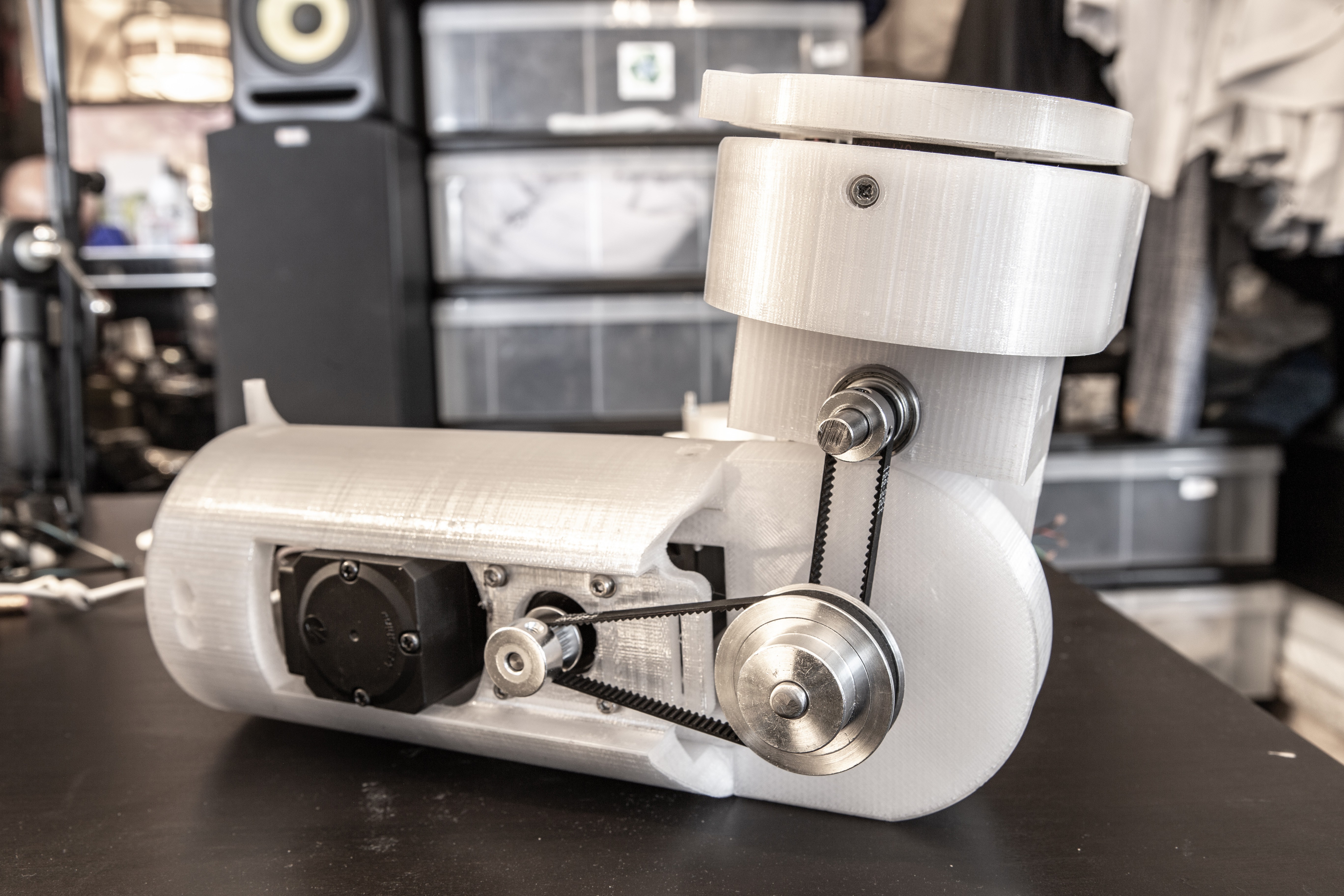
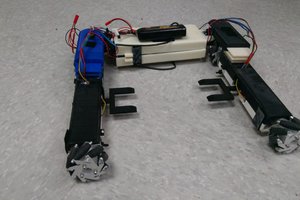
I have worked for 3 weeks on these 2 joints hardware, most of the time doing tests on the endstops positioning as well as the length of the closed loop 2GT belts.
Joint 6's motor is decoupling through a series of 4 2GT timing pulleys which should reduce the inertia of the whole assembly. While this setup increases the complexity of the programming, I find that the mechanical advantages far outweighs its drawbacks.
Uploaded some of the designs images, an introductory video and the .step file of the robot.


Yes, infact I will also provide a VREP simulation for the robor. At the moment I have a little struggle with the plan ahead algorithm, which is similar to what most 3D printers are doing. It will be resolved soon though. and till then I will provide the source code.

can you please send me your email or rply on my massage thanks for you







 Will Donaldson
Will Donaldson
 Aaed Musa
Aaed Musa
 barbbasia
barbbasia
This looks awesome! Are you planning on providing the kinematics and code as open source?
I would love to try this out with your harmonic drive's. Keep up the great work!