-
Hip Joint Built and More Upgrades
01/13/2020 at 08:02 • 0 comments![]()
![]()
![]()
![]()
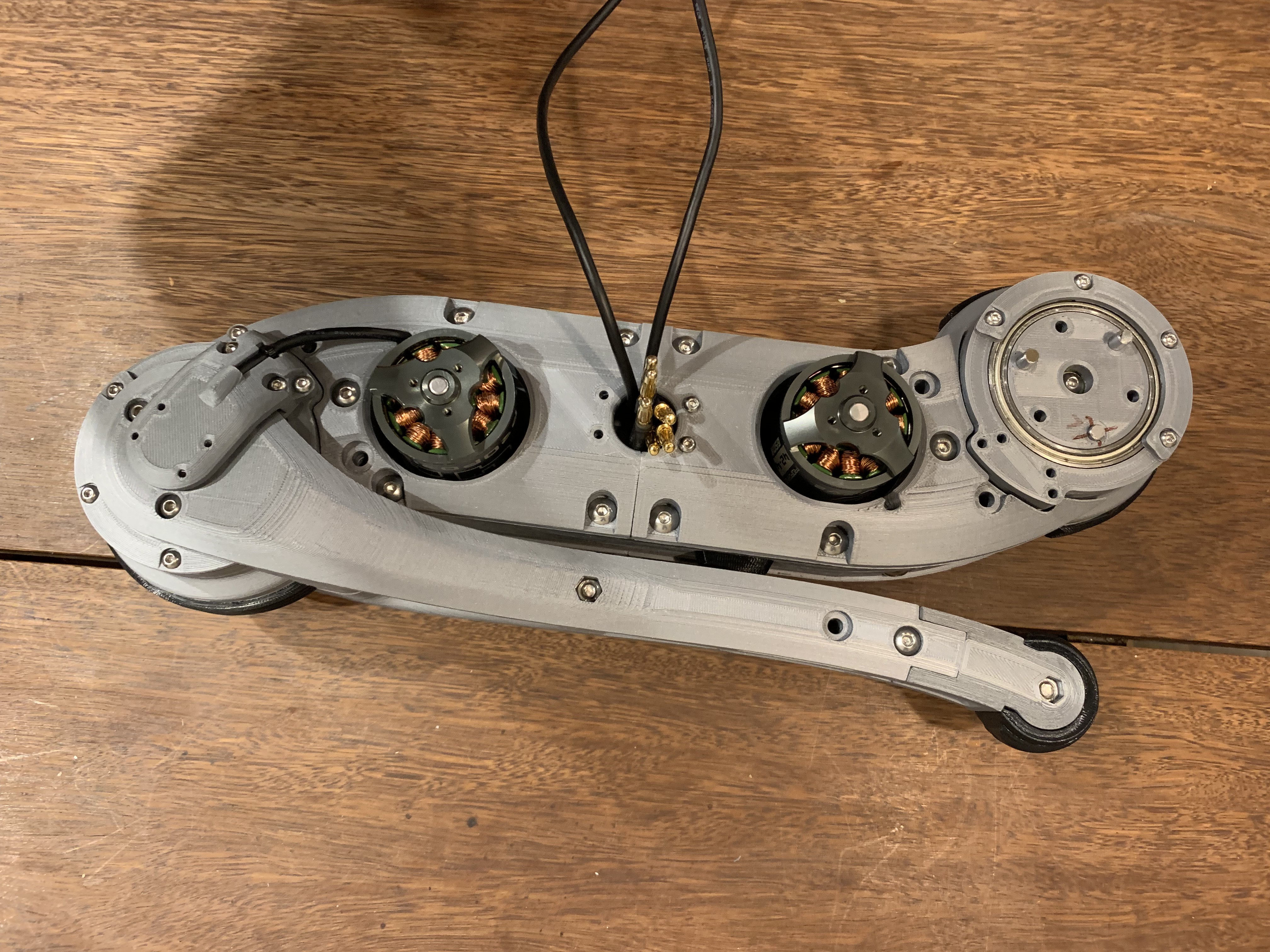
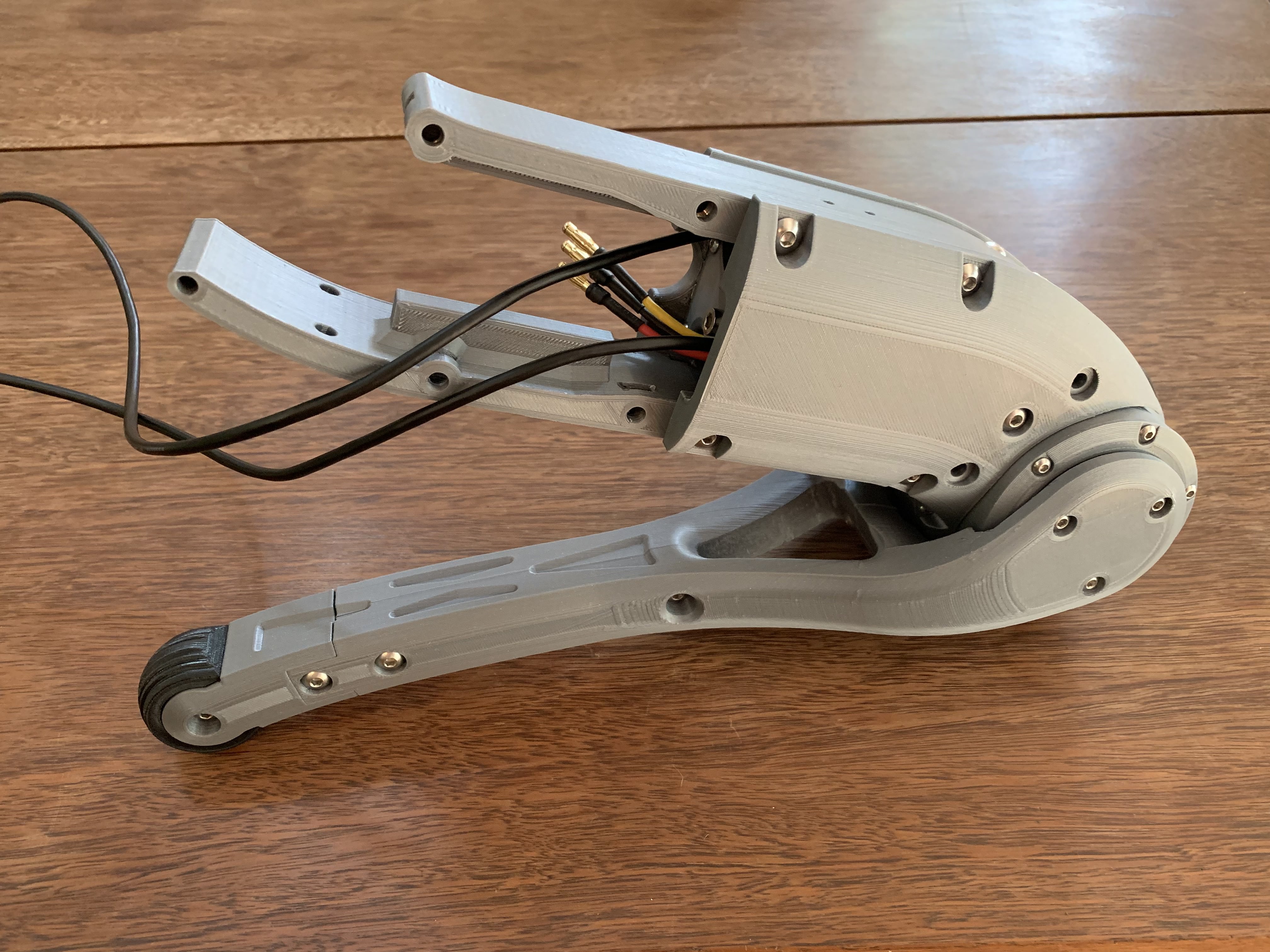
This update is very late as I finished printing and building the hip joint towards the end of July last year just as I started my first semester of uni and got a bit preoccupied. I am very happy with the way the parts went together and work. Everything feels very sturdy and the joints are both smooth.
![]()
This is a stand my dad and I built so I could start to program it to move without it sitting on the table.
I was having trouble getting my teensy 3.6 to talk properly to the Odrive and got a little demotivated on that front as the design and building is more my thing. However I did get it to move one joint at a time using the computer interface to the Odrive, I will put a video of this in the 'uploads' section.
Since the end of my uni semester I have begun working on the leg again. Mainly upgrading parts with better designs and better materials as well us upgrading the electronics to try narrow down the issues I am having with the Odrive/Teensy. I will post an update on these upgrades later when Im happy with them.
After I have finished with these upgrades and I go to reassemble the leg I will write up a parts list and a loose assembly guide and post the STL files for all of the parts. I feel selfish for not posting the Fusion360 files but they are a bit of a mess to be honest and I guess I havn't seen the light of open source. Maybe in the future :) -
Upgrades and Changes
06/20/2019 at 02:45 • 0 commentsI have been tweaking the design over the past month as to improve some aspects I wasn't happy with. I also added some functionality.
Changes Include:
- Added AS5048A magnetic encoder to the joint to give absolute position feedback from the joint. This will allow the robot to know the positions of all the joints on startup without homing. (This was always intended to be in the design I only just got around to adding it)
- Swapped all the gear teeth from straight cut to helical cut. I should have started with helical gears as changing them this late in the design messed with my Fusion 360 timeline and I had to do some sketchy stuff to keep the design as parametric as possible. It was well worth it as it reduced the backlash from about +- 3mm at the foot to absolutely nothing and made the gearboxes significantly more smooth with no stiff spots. This came at the small cost of increasing the force required to back-drive the joint but I think its worth it. (Having no backlash makes programming much easier)
- Swapped out the AMT 102-V encoder for an AS5047P magnetic encoder. I was having trouble getting the alignment of the AMT encoder right because I was mounting it upside down to maximise the length of the motor shaft I could get into the collar. This was causing rubbing inside the sensor so I swapped it for a magnetic encoder which was much easier to mount and there is no chance of rubbing.
- Found some new TPU filament for the foot and knee pad which as a bit softer and actually grippy.
I am now pretty happy with the design of the joint so I will begin printing all the parts for the hip joint and should hopefully have it done soon :)
![]()
![]()
![]()
3D Printed Quadruped Leg
A 3D printed robotic leg, inspired by Boston Dynamic's Spot Mini robot. Aimed to balance form and function