 designlab.ac
designlab.acOPPORTUNITY
A modular system needs to be developed that can be equipped with modern sensor technology to gather detailed and diverse data. Having such data would allow us to make decisions for future generations and create sustainable policies to maintain the health of the ocean environment. Furthermore, it should serve an educational purpose to help people learn more from the oceans and create awareness with the general public about the fragile marine habitat.
OMNI
The system is designed to deliver a high-resolution overview for a local area, in a short to midterm duration and for a low initial cost. It is an open source platform so that improvements and ongoing developments can be shared. An active community would be necessary to share and test different solutions for specific problems and user scenarios. The data management system, sensor technology and interface would be incrementally improved over time on the basis of this input from the community.
https://vimeo.com/manage/303621286/general
KEY DECISIONS
An initial step was to make decisions regarding key criteria such as cost, size and electronic control system for the ocean float. The OMNI system should be inclusive, open and easy to build for everyone. It must be affordable, which in turn then has a direct influence on the choice of components and materials. A small (under 0.125m3 volume) float with less volume would be cheaper to build and also portability and deployability would be better with a small device, too. A two component polyurethane (PU) foam turned out to be easy to work with and proved to be adequate for the floating body. The solar panel has a relatively large surface area and needs direct exposure to the sun. Direction and position of this component are important factors and therefore the size of the floating device is proportional to the solar panel. The electronic circuit is based on the Arduino platform, which is highly popular for all kinds of hobby and professional projects.
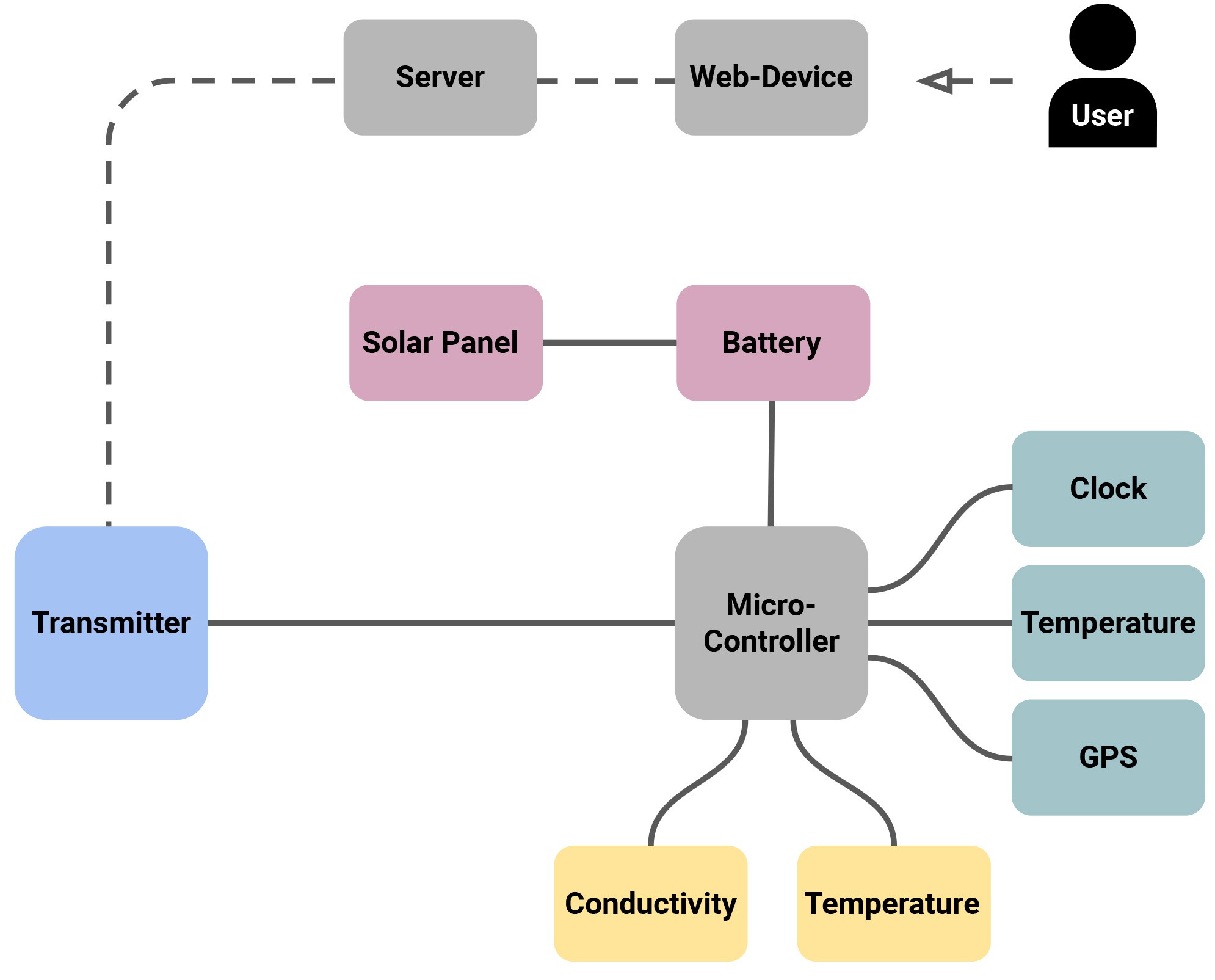
SYSTEM & COMPONENTS
In its current format OMNI is a system with multiple components that need to be taken into account to realise an efficient and user-friendly platform. The key components are:
- Enclosures and Casings
- Buoyancy body
- Hardware enclosure
- Sensor mounting stem
- Control System
- Circuit boards (Arduino)
- Software
- Energy management
- Energy storage
- Energy harvesting (Solar panel)
- Sensors
- Primary
- Position (GPS)
- Onboard temperature
- (Battery status)
- Secondary
- Conductivity (used for salinity reading)
- Temperature (water)
- Communication system. Currently there are three options:
- Satellite
- LTE (mobile phone network)
- LoRaWan
- Data
- Precision
- Visualisation
- Web Interface
- Interface for real-time data
- Project mission and outline
- (Community platform)
Data:
Data is collected according to a fixed time frequency from each single OMNI float; Index, date, time, GPS, satellites, signal strength, onboard temperature, temperature and conductivity. The index is a consecutive number to record the order of all incoming data sets. Date and time are crucial to calculate the amount of successfully retrieved data for each time interval. The GPS data will be important for free-floating OMNI devices in the future. The current precision is approximately 25 m if we neglect the readings with less than 5 satellites. The network signal strength is an indication of reliable transmissions. LTE is measured on a scale from 0 to 5 and LoRaWan is descending from 0 dB to -124dB. A larger number is equivalent to better reception in both cases. The onboard temperature is an indicator for potential malfunction of the circuit board. To calculate salinity, we need to capture the water temperature and conductivity. The calculation is done on each single OMNI module and all three numbers are sent separately to the web server. The digital temperature sensor has a tolerance of 0.5 C°. The conductivity sensor is stated with a range of 0.07 − 500,000+ µS/cm and an accuracy of +/– 2%. In our sea trial set-up, we reached a maximum...
Read more »

 Noah
Noah

 Alfredo L'Homme
Alfredo L'Homme
Is it a public funded project?