0%
0%
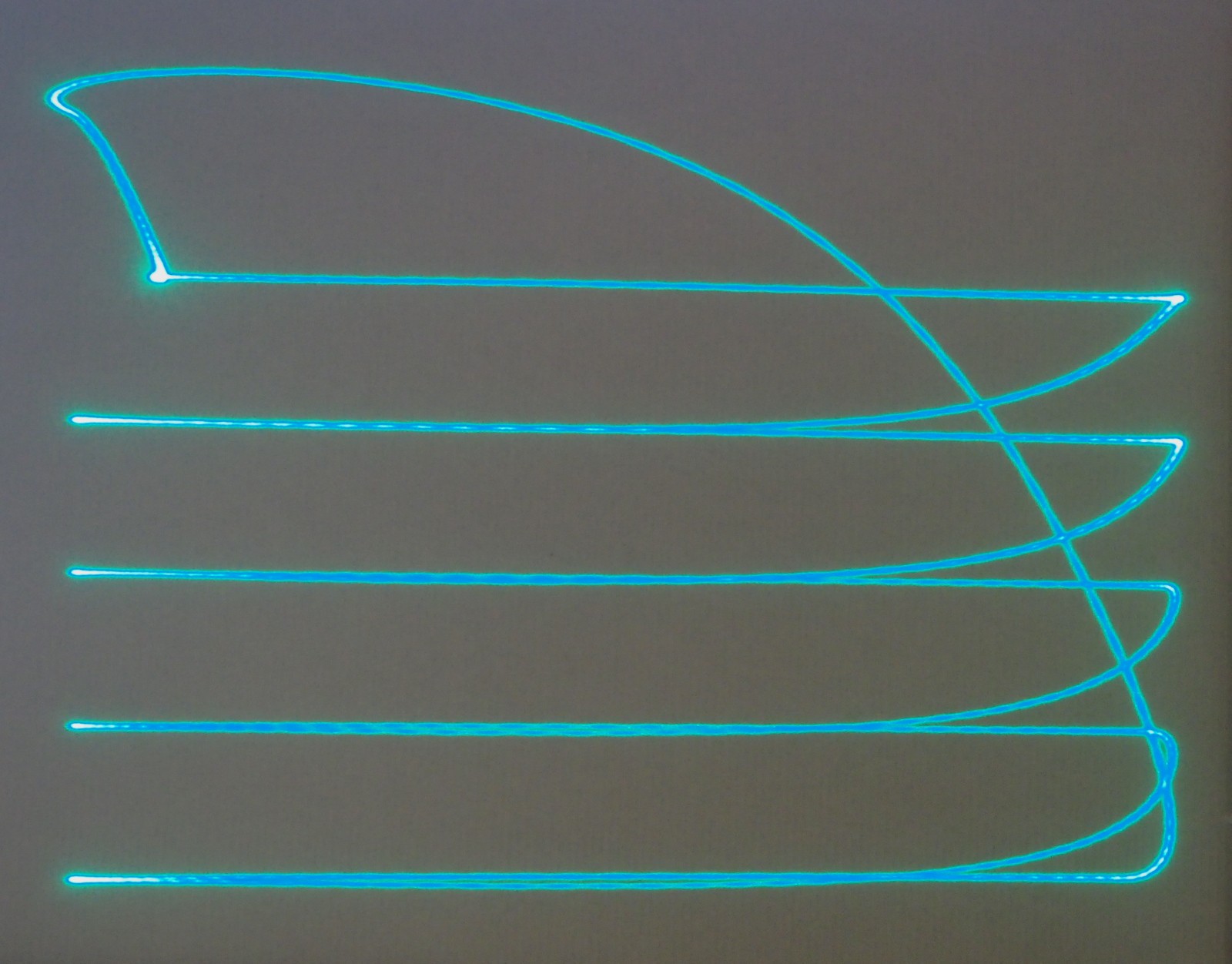
Laser Galvo Clock
Clock projected onto the wall with cheap laser galvos
 Alan Green
Alan GreenBecome a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests










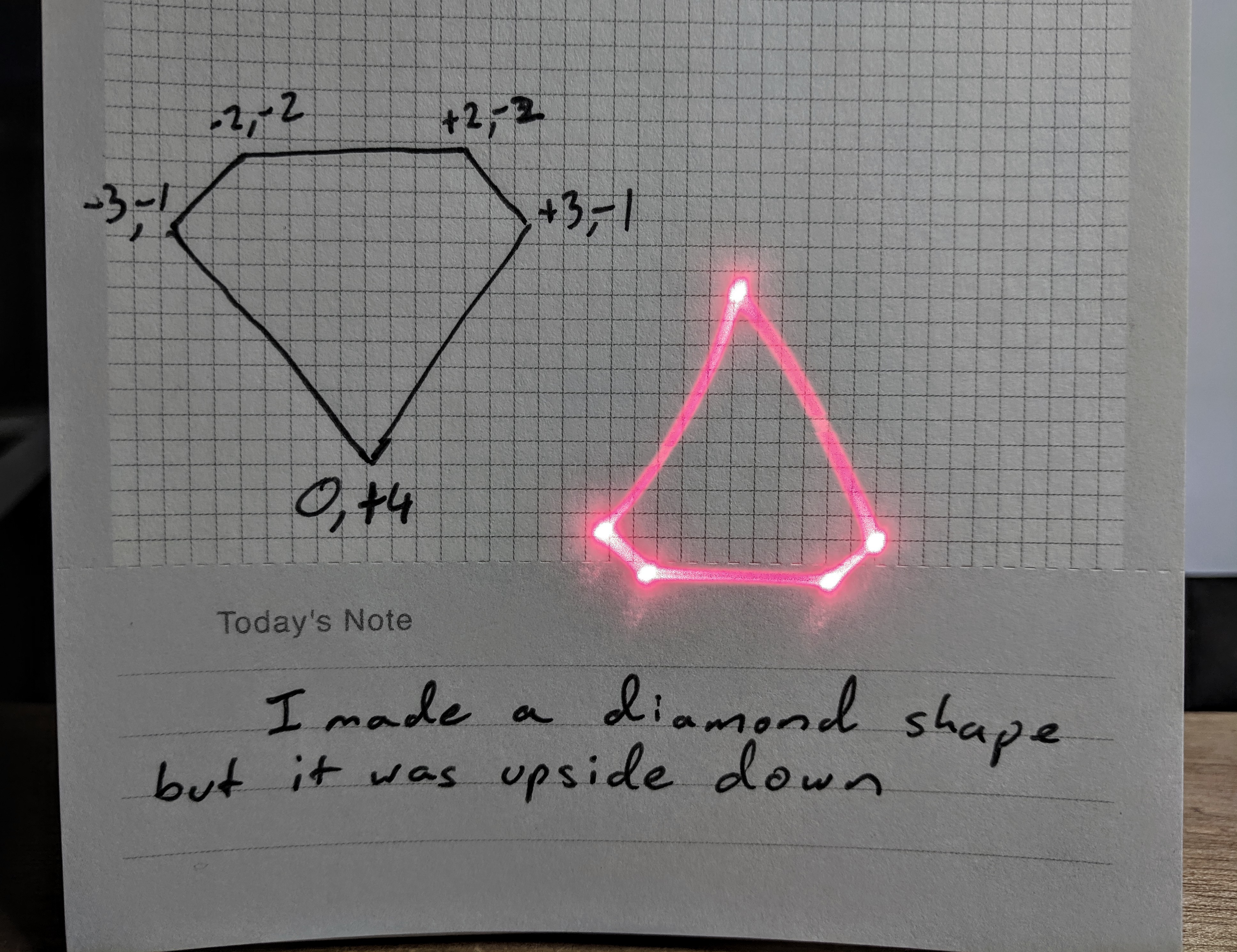


 The picture to the right is a scan of my first planning sheet. While constructing it, I made a few changes, which you can see in the larger image, below.
The picture to the right is a scan of my first planning sheet. While constructing it, I made a few changes, which you can see in the larger image, below.






 Nick Sayer
Nick Sayer
 Zach Baldwin
Zach Baldwin
 Beaglebreath
Beaglebreath
 David Brown
David Brown
Excellent, definitely want to muck about with some laser effects soon!