 Etienne
EtienneIt is quite common to describe a software architecture as a stack.
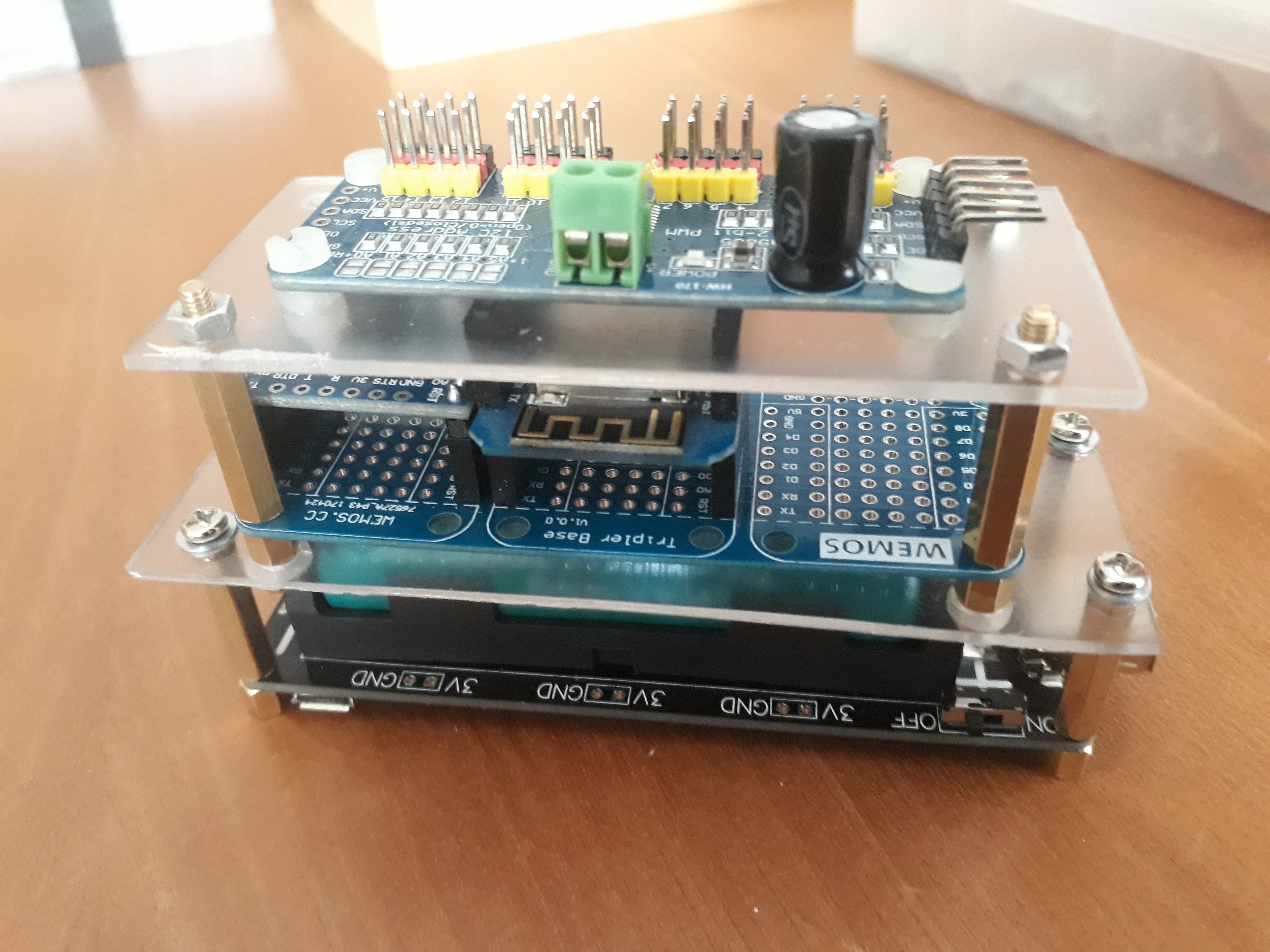
Now in the hardware electronics domain, with the generous use of stackable daugherboards or shields, I would describe Wall-E's brain as a hardware stack!
At the bottom, a 18650 Li-Ion battery module (the module provides charge control and 5V / 3V output regulation) ; Middle-layer : a Wemos ESP8266 microcontroller (32bit core, WiFi interface, 4MB flash), Wemos motor shield (controls track motors through a dual H-bridge, over I²C), and on top, a servo controller IC (PCA9685 circuit, controlled over I²C, sends 16 PWM signals, therefore control the position of up to 16 RC servos). I have 2 degrees of freedom for head pan & tilt, 3 for each arm (shoulder elevation, shoulder extension, and fingers open/close). That leaves me with 8 unused PWM channels... any idea where I could fit another servo? =o)
Two plexiglas boards are necessary to adapt the mounting holes between modules.
It may look tidy without cabling; but much less so when the power supply and I²C buses run between all layers...
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.