 Sinclair Gurny
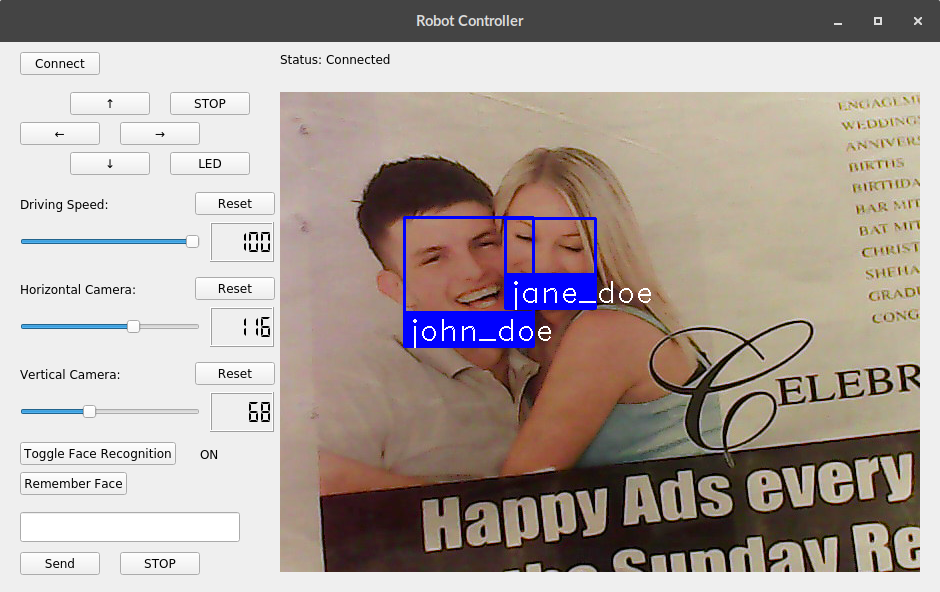
Sinclair GurnySo as any logical person would do with a robot that can be programmed to do anything. I add the ability to detect and recognize faces.
https://github.com/ageitgey/face_recognition
After some experimentation I add the code into the robot. Which makes it run so slow I can no longer drive it.
So, after reducing how many times the recognition runs the robot becomes drive-able again. I also add the ability to save any faces currently in the view of the robot.
Later I add a slightly better way of importing faces, with a file (faces.txt) that links the name with the file of their face. The program on startup reads the file and processes it.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.