0%
0%
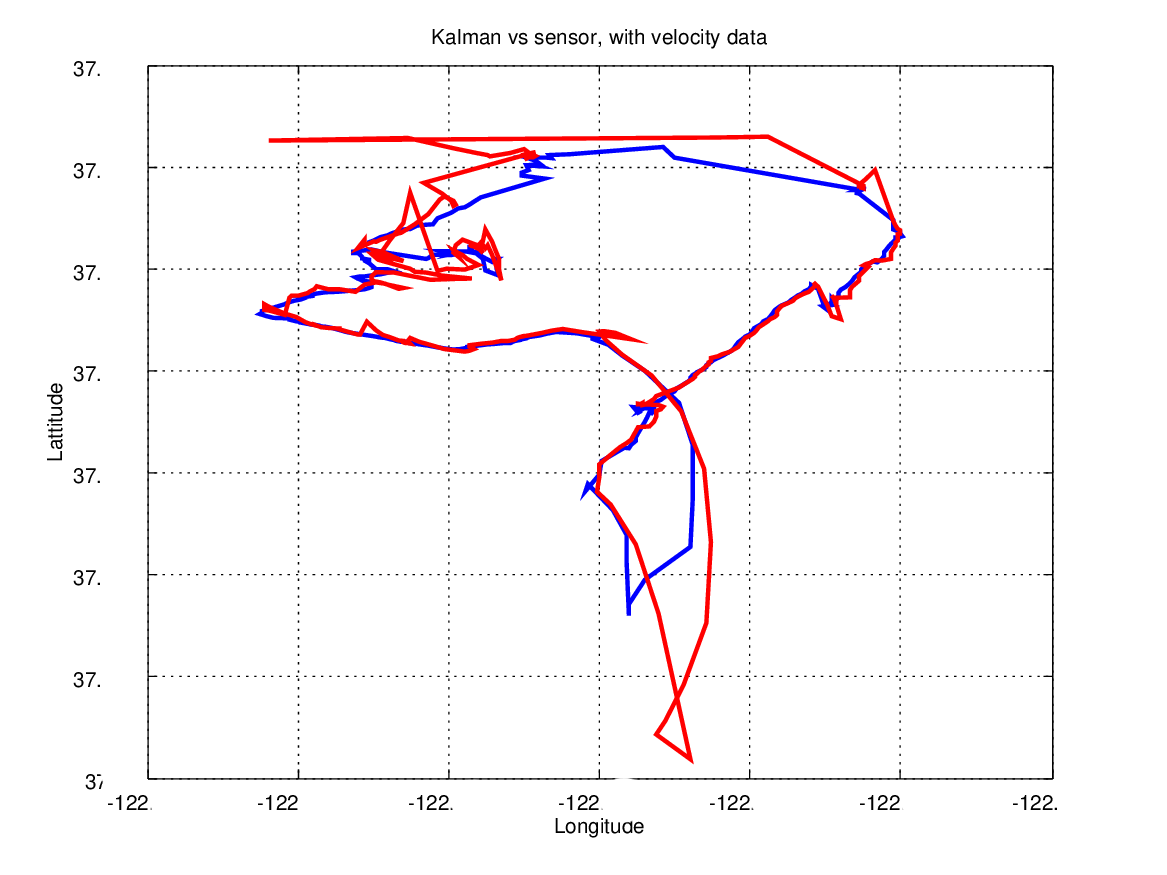
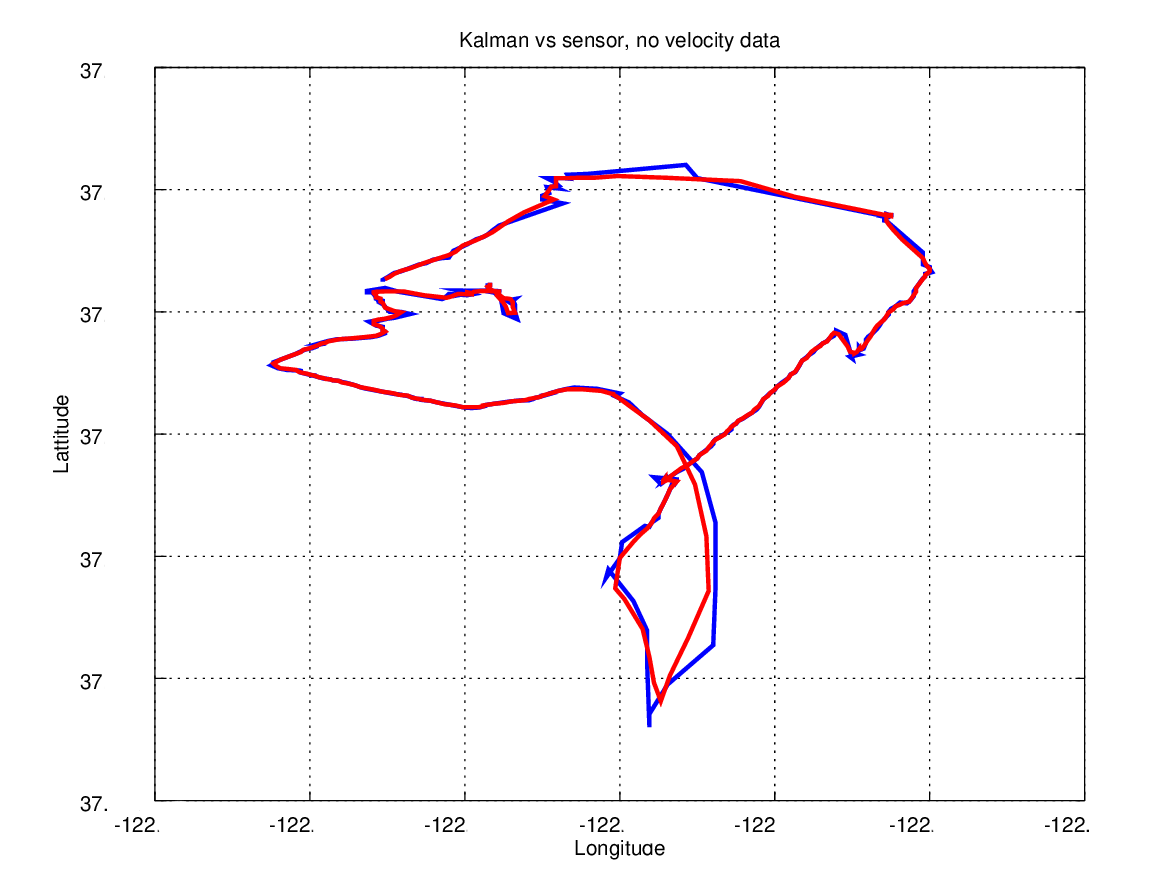
Bike Computer with Flight Software
I want to track my bike rides and get some experience with CoreFlight
 Jacob Killelea
Jacob KilleleaBecome a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests




 parasquid
parasquid
 Vasilis Georgitzikis
Vasilis Georgitzikis
 Dan Maloney
Dan Maloney
 Arya
Arya
The typical SSD1306 OLED display will not be visible in sunlight. My suggestion would be to go for a transflexive device, like the nokia LCDs or the monochrome 128x64 LCDs.