0%
0%
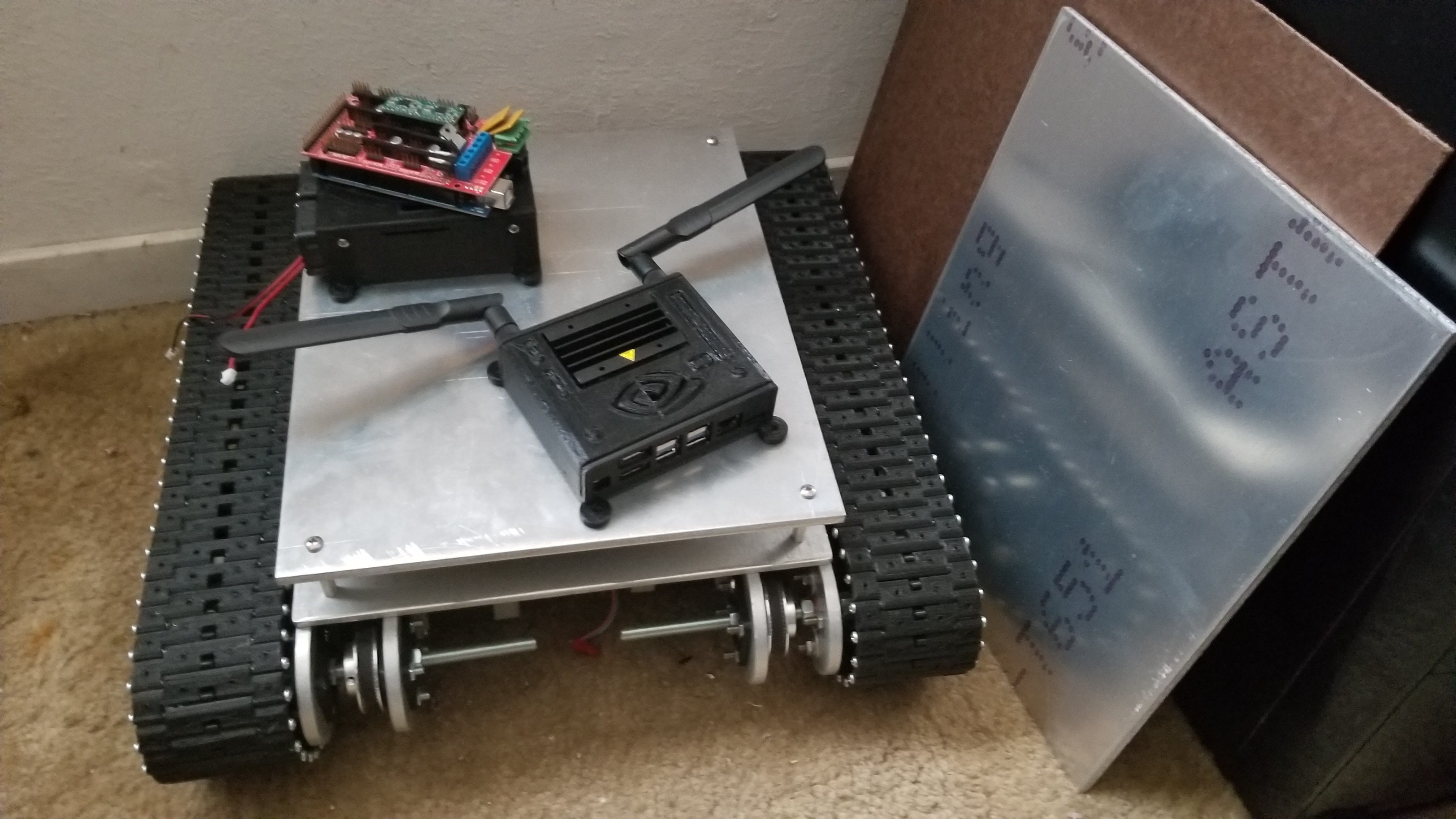
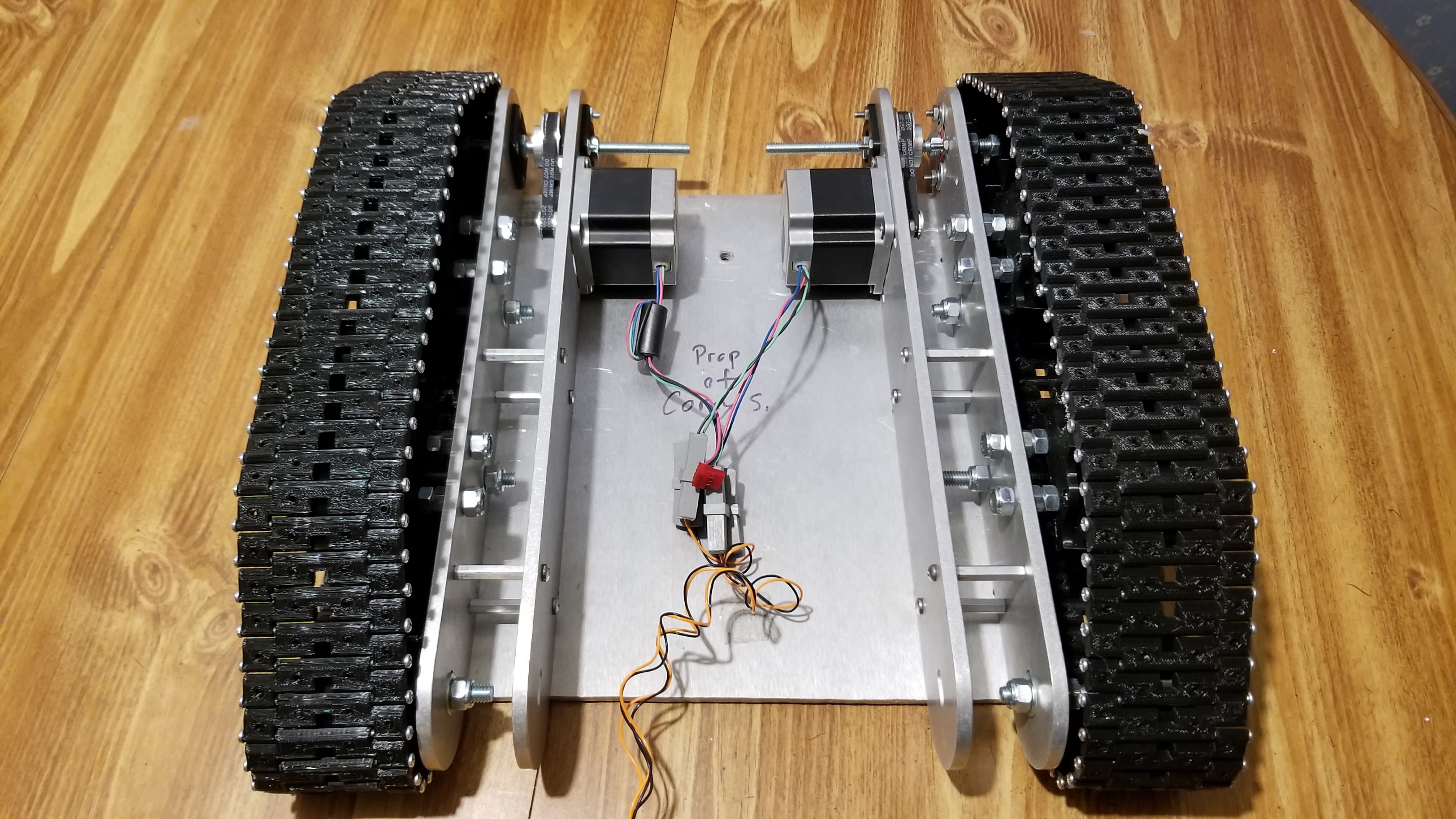
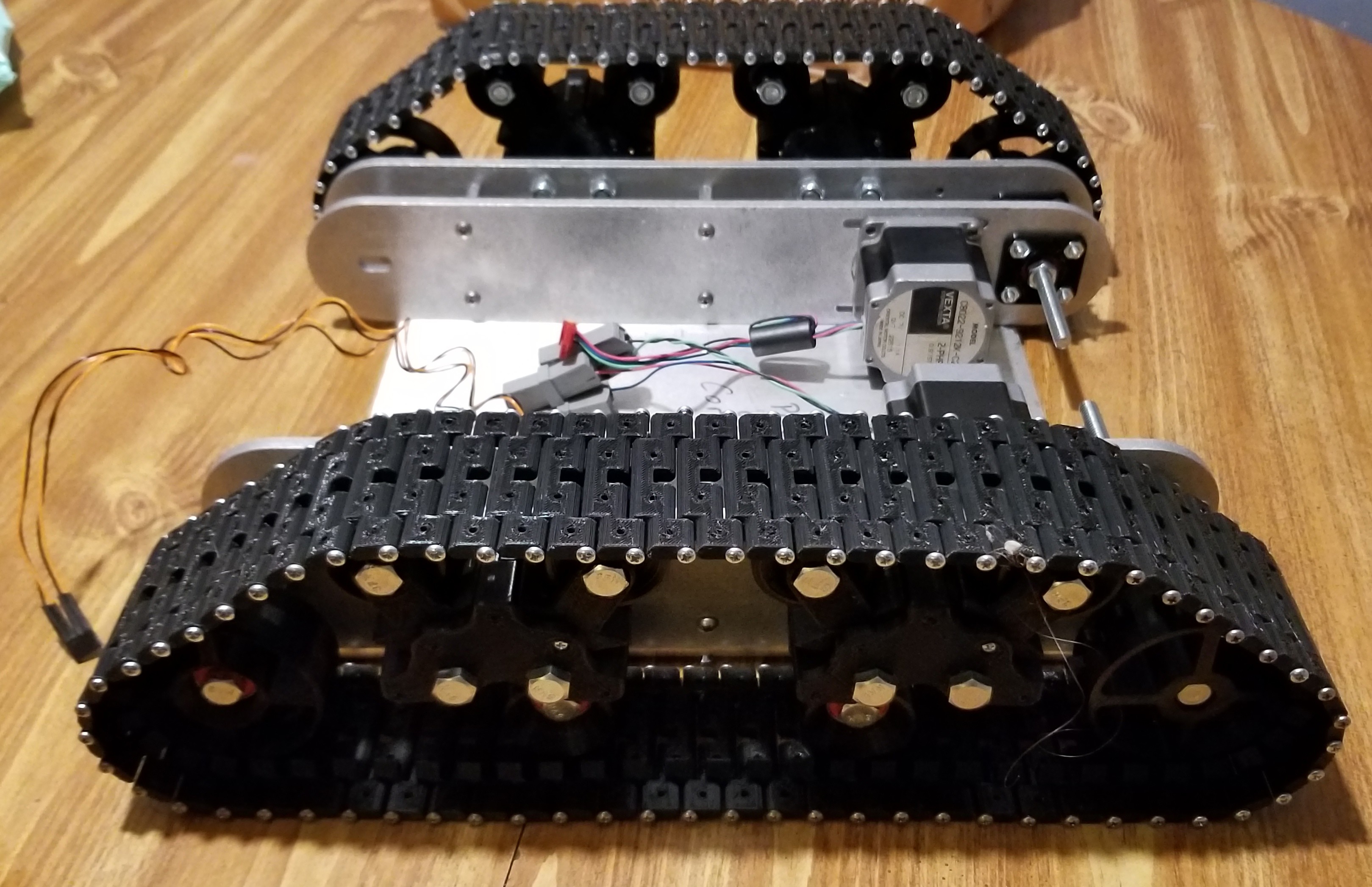
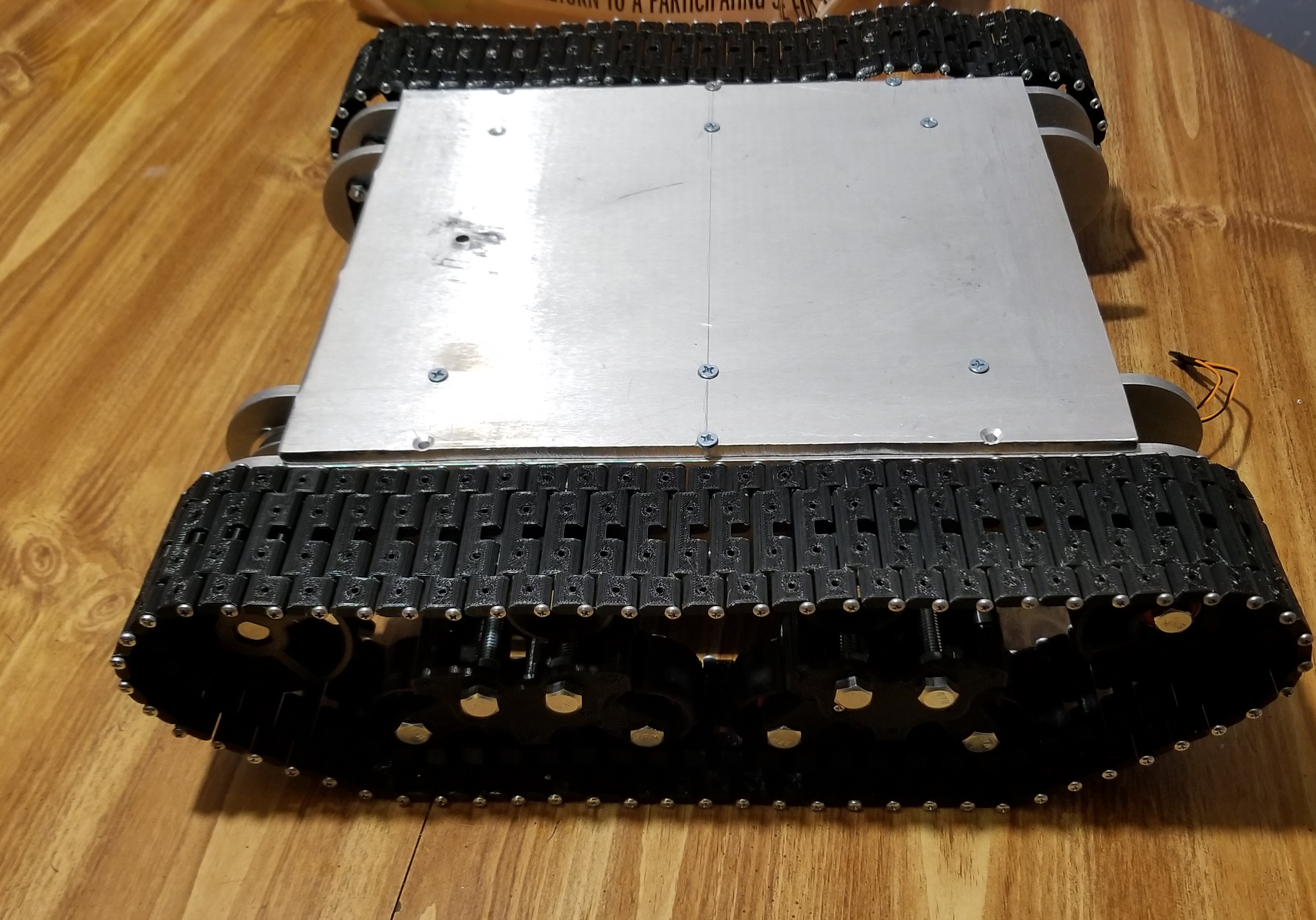
Robot Tank /w Jetson Nano
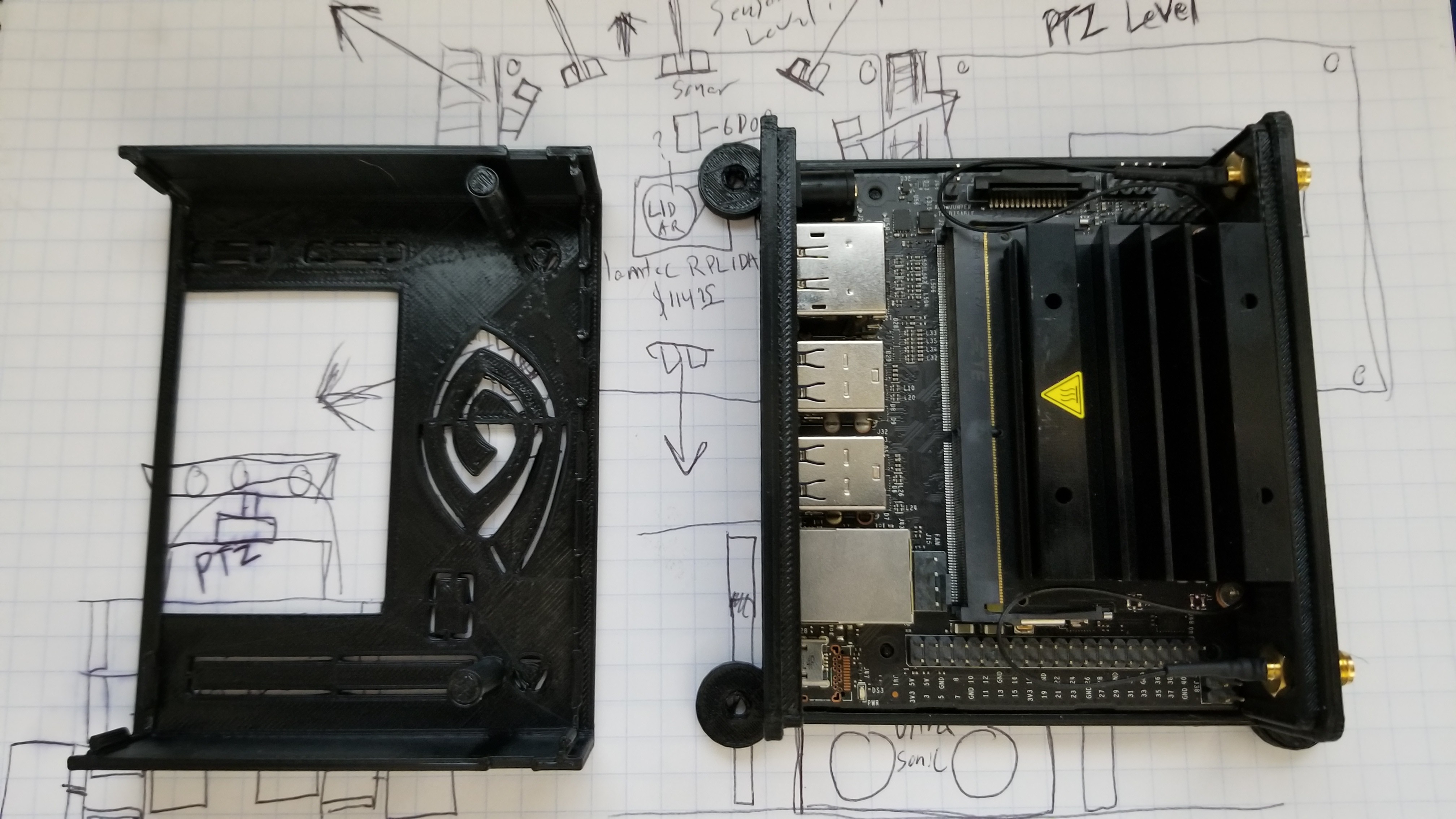
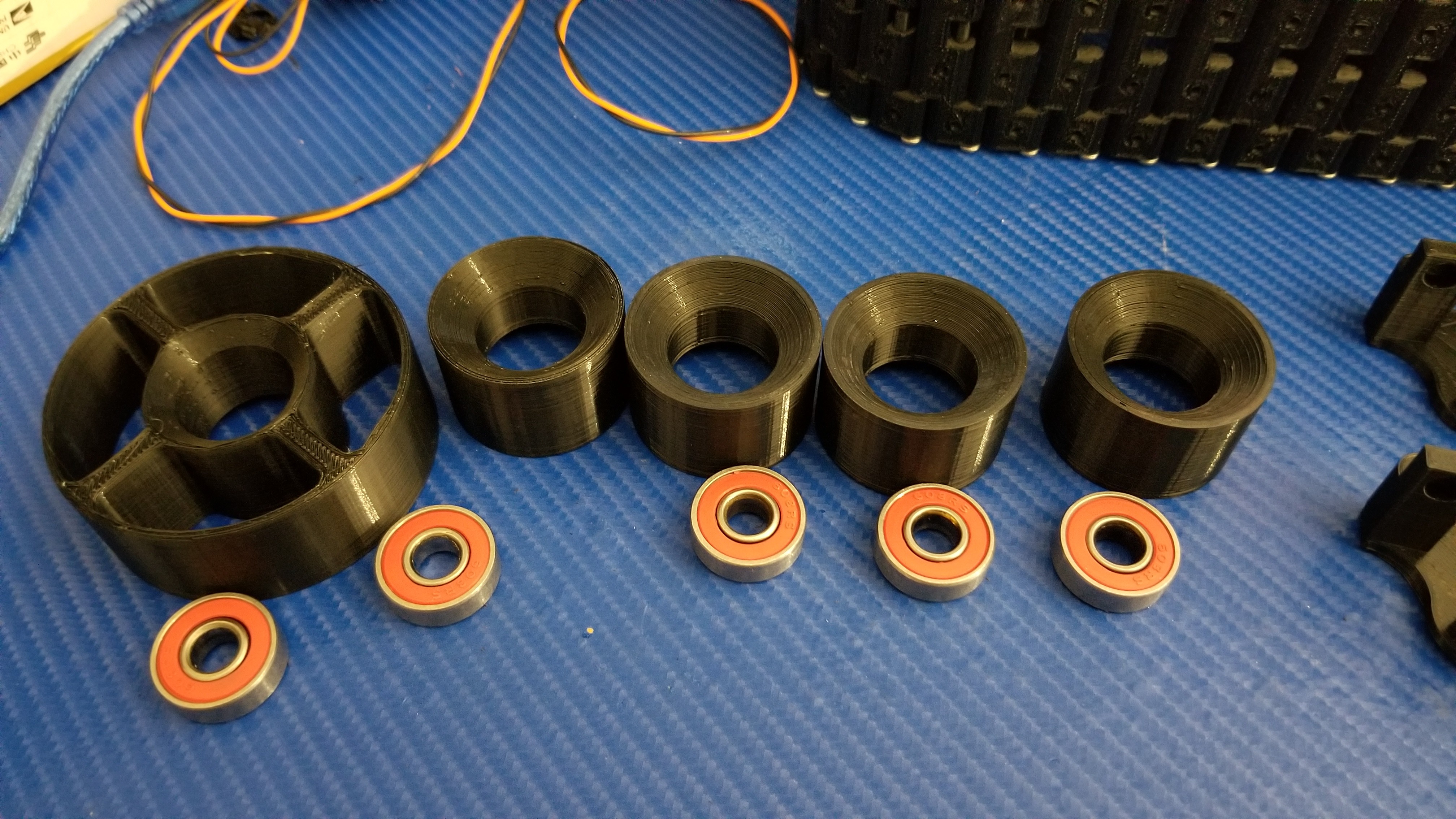
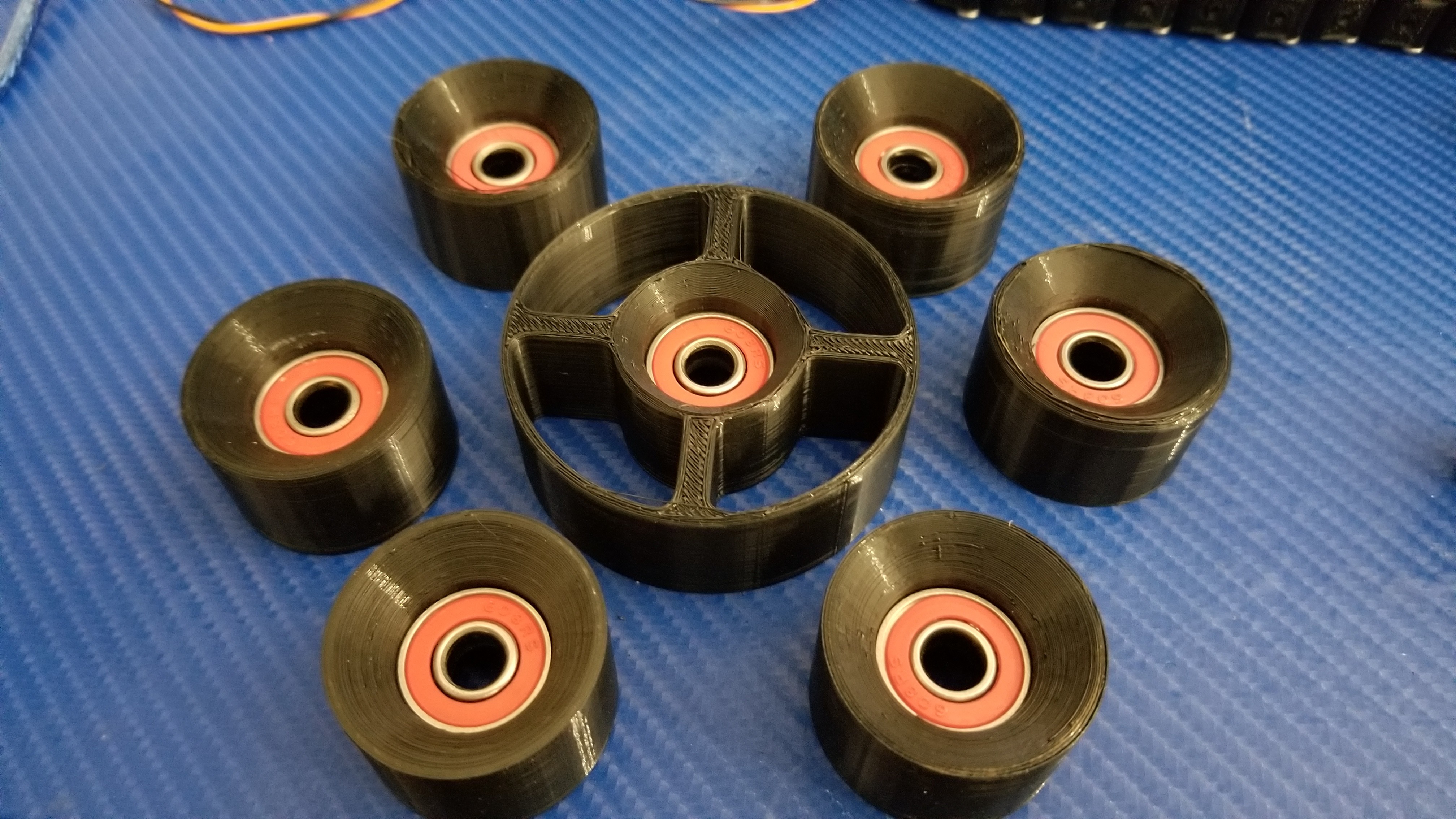
Starting work on a tank track robot. Purchased a Jetson Nano for the main controller brain. Arduino Mega + Ramps for motor control
 pRoFiT
pRoFiTBecome a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests







 Daren Schwenke
Daren Schwenke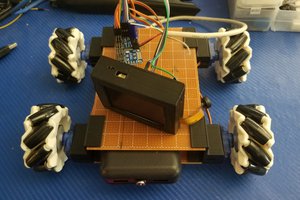

 Paul Crouch
Paul Crouch
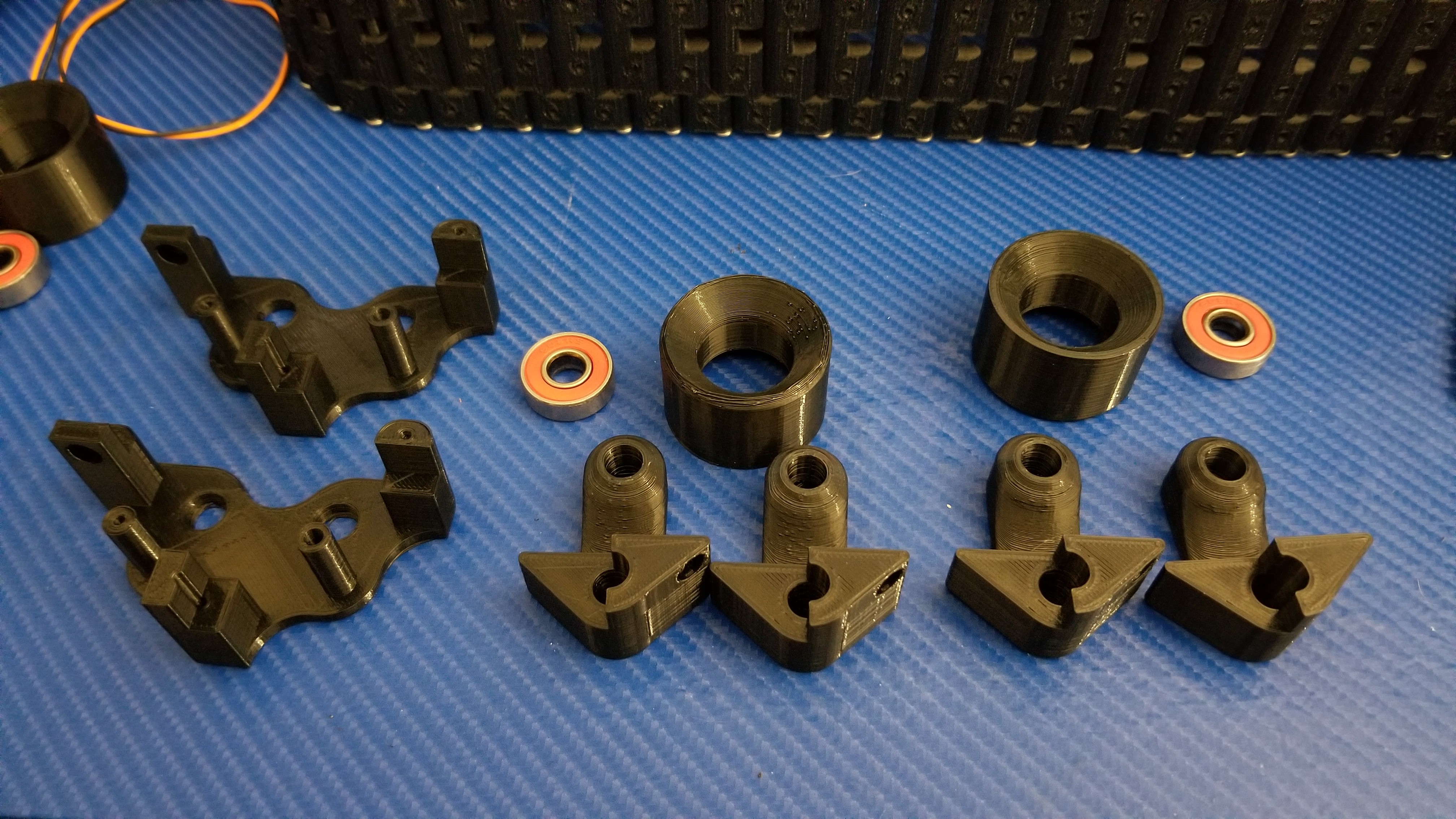
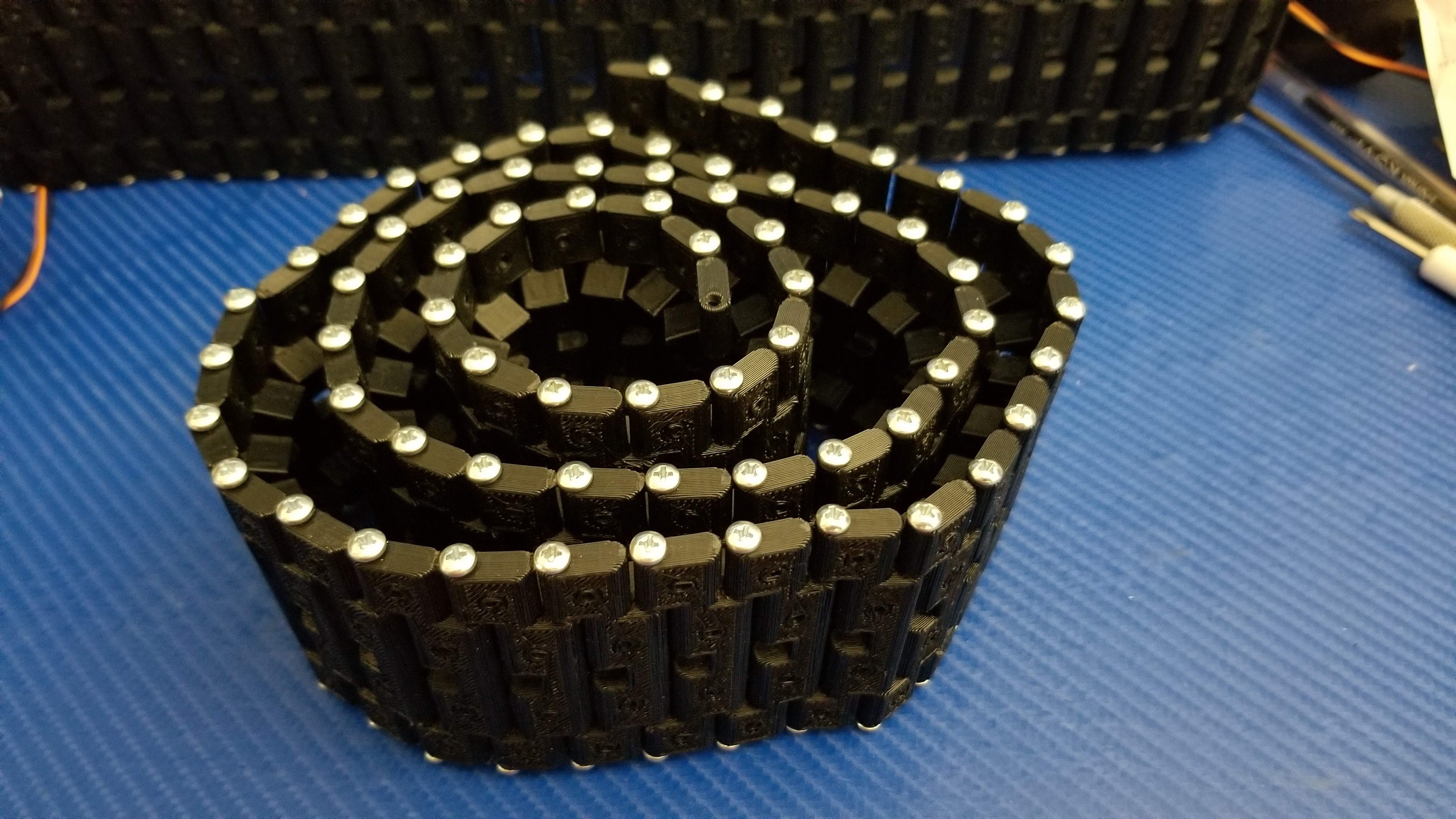
Wow, is that suspension system for the treads your original design? Look like a good method to help keep the vibrations from shaking the body of the robot apart. Are you happy with the results so far?