 Cees Meijer
Cees Meijer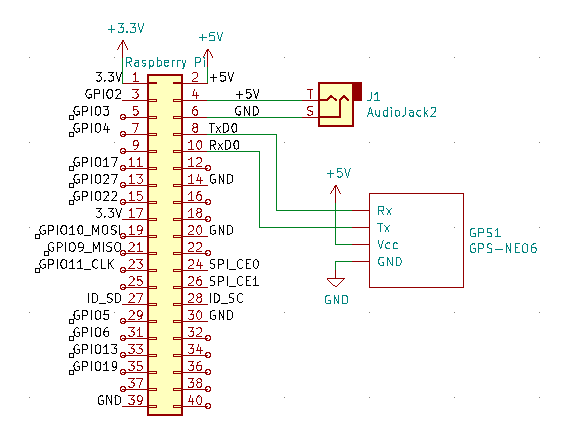
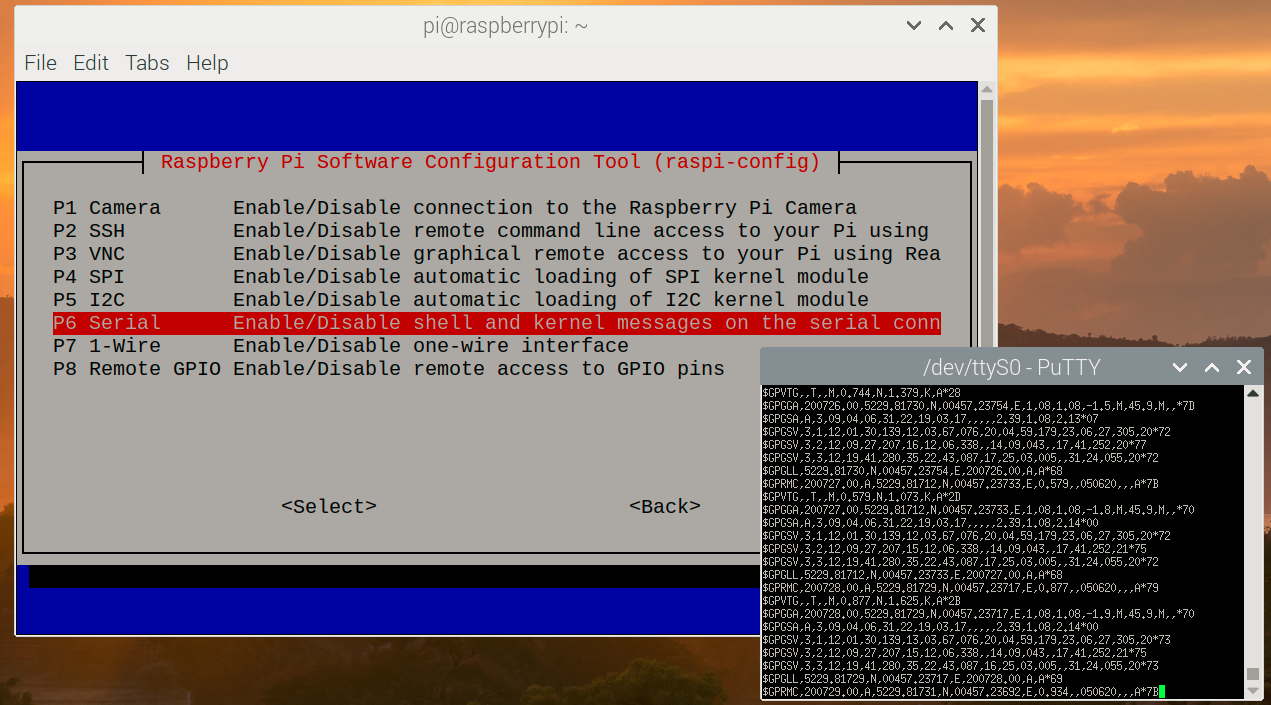 Now I installed PuTTY (sudo apt-get install putty), set it up for Serial port '/dev/ttyS0' and 9600 baud. This immediately shows the NMEA text messages as they are coming from the GPS receiver. Can't be easier than that.
Now I installed PuTTY (sudo apt-get install putty), set it up for Serial port '/dev/ttyS0' and 9600 baud. This immediately shows the NMEA text messages as they are coming from the GPS receiver. Can't be easier than that.After adding the GPS receiver it was time to read it. I first tried the GPSD project which tries to make reading GPS data in the background easy. But after struggling some time to get it working I decided it was not what I was looking for. As always with these kind of projects there are many examples and HowTo's , but I assume a lot of them are outdated or just incorrect for the setup that I have so none of the examples worked as described. And since I basically only needed position heading and speed from this specific GPS receiver I opted to use the TinyGPS++ package. This is actually a library written for the Arduino, but only minor changes were needed to get it running on the Pi. My version is here: https://github.com/Cees-Meijer/GPS_Decoder
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.