 Thomas Bladykas
Thomas BladykasThis is a little journey back into the prototyping for this project.
It all started with a dream...
The original idea:
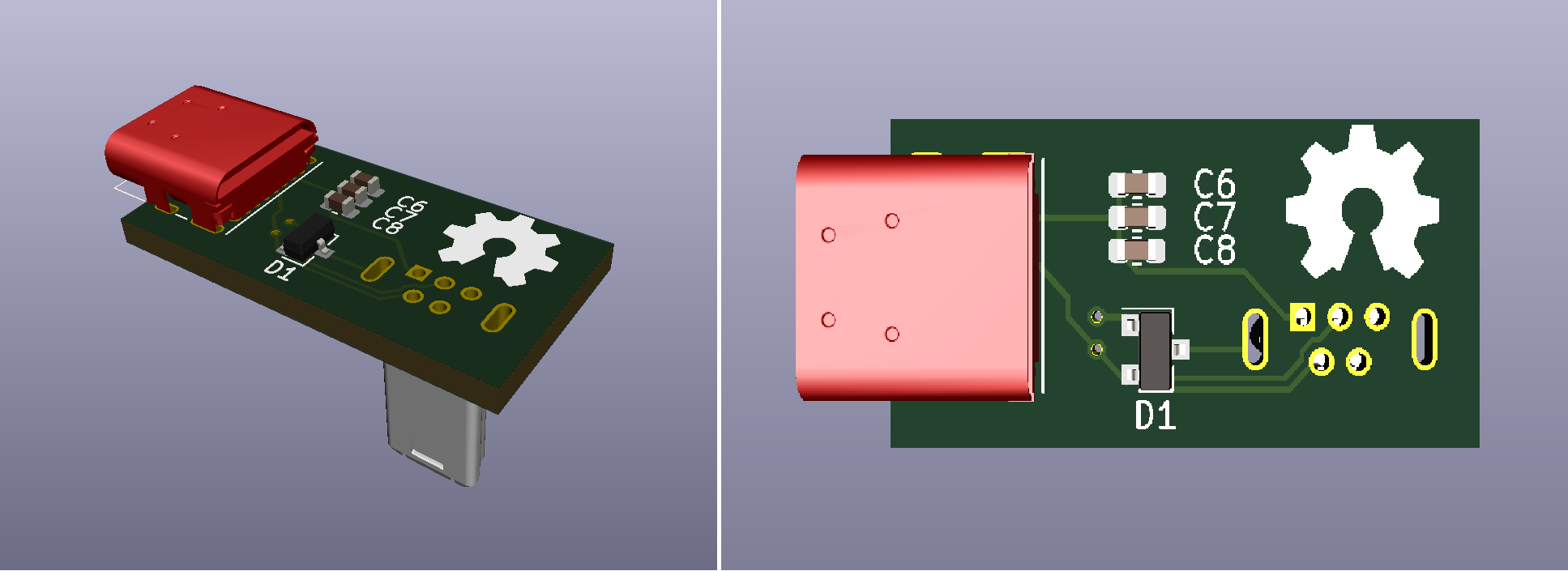
- Create a board that would simply convert the Mini-B connector on the REV Expansion Hub to a Type-C port.
- Include ESD protection on the USB lines for extra disconnect resistance.
- Make sure it's sturdy and can last for much longer than a Mini-B cable.
And thus, the mini V1 prototype was born:
However, after I did some polling of interested customers, about 2/3 of teams responded that they would also like to use a webcam on their robot. That would mean introducing a USB hub into the wiring of the robot, which can lead to disconnects from the sheer number of connections.
So what's the solution? Slapping a USB hub controller on the board, obviously.
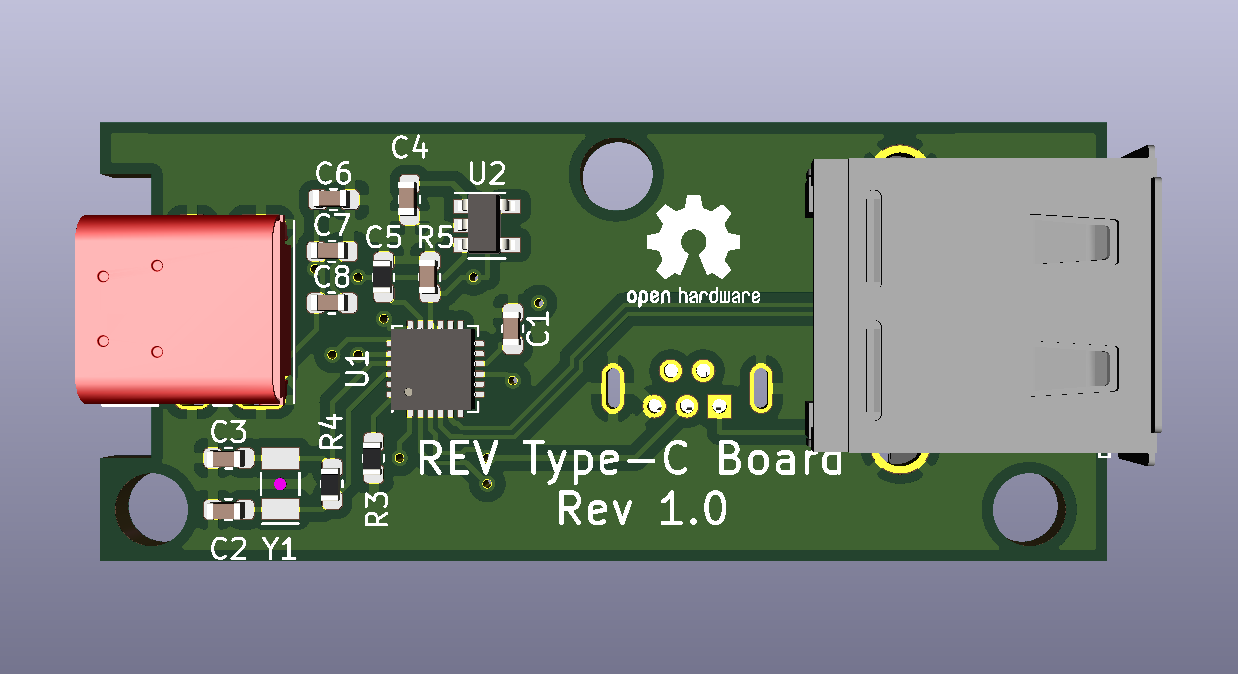
The IC used was a USB2422 from SMSC (Microchip). This is the absolute smallest 2-port USB hub chip available. The LDO was an NCP170 LDO. Unfortunately, I learned the hard way that you can't just willy-nilly route the USB lines on a 2-layer board, because no matter what I tried, I was always greeted with USB errors.
It was time for some research...
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.