 Peter Wasilewski
Peter WasilewskiIdea of control
Decided to build custom motor controller I was forced to learn about the technology used to control motors these days. My goal was to achieve high torque at very low rotational speeds. This assumption made me reject trapezoidal control as it is usually used to drive motors at high velocities, without any precision in positioning. Another considered type of control was sinusoidal – with appropriate PID control it was capable of driving the motor at really low speeds (limited by the resolution of the encoder). Reading about any other solutions I came across FOC ( Field Orientated Control). I’ve been reading about it for some time and eventually decided that it was the most sufficient way of driving the motor. The algorithm was dividing the current in two vectors – one responsible for field weakening (normal) and the other having direct impact on the torque (tangential). The goal was to bring the normal vector to 0 and control directly the torque using tangential component using PD control. In order to have feedback I had to read the phase currents with shunt resistors and then transform them into these two vectors.
Simulation and hardware
I started with computer simulation in order to see if I get it all right. When the virtual motor starter rotating I was able to start designing the hardware. The schematic and 2-layer circuit was developed in Eagle and then manufactured in China by PCBway.
Main features of the controller:
-STM32f405RGT6 microcontroller
-DRV8323SRTAT MOSFET gate driver (SPI version)
-3x double N-channel
-CAN controller
-12bit AS5145B encoder
-external connector for second encoder
I guess the board itself looks fine, it could be smaller (smaller footprints of the components) however I am satisfied with the result for now. That how it presents:
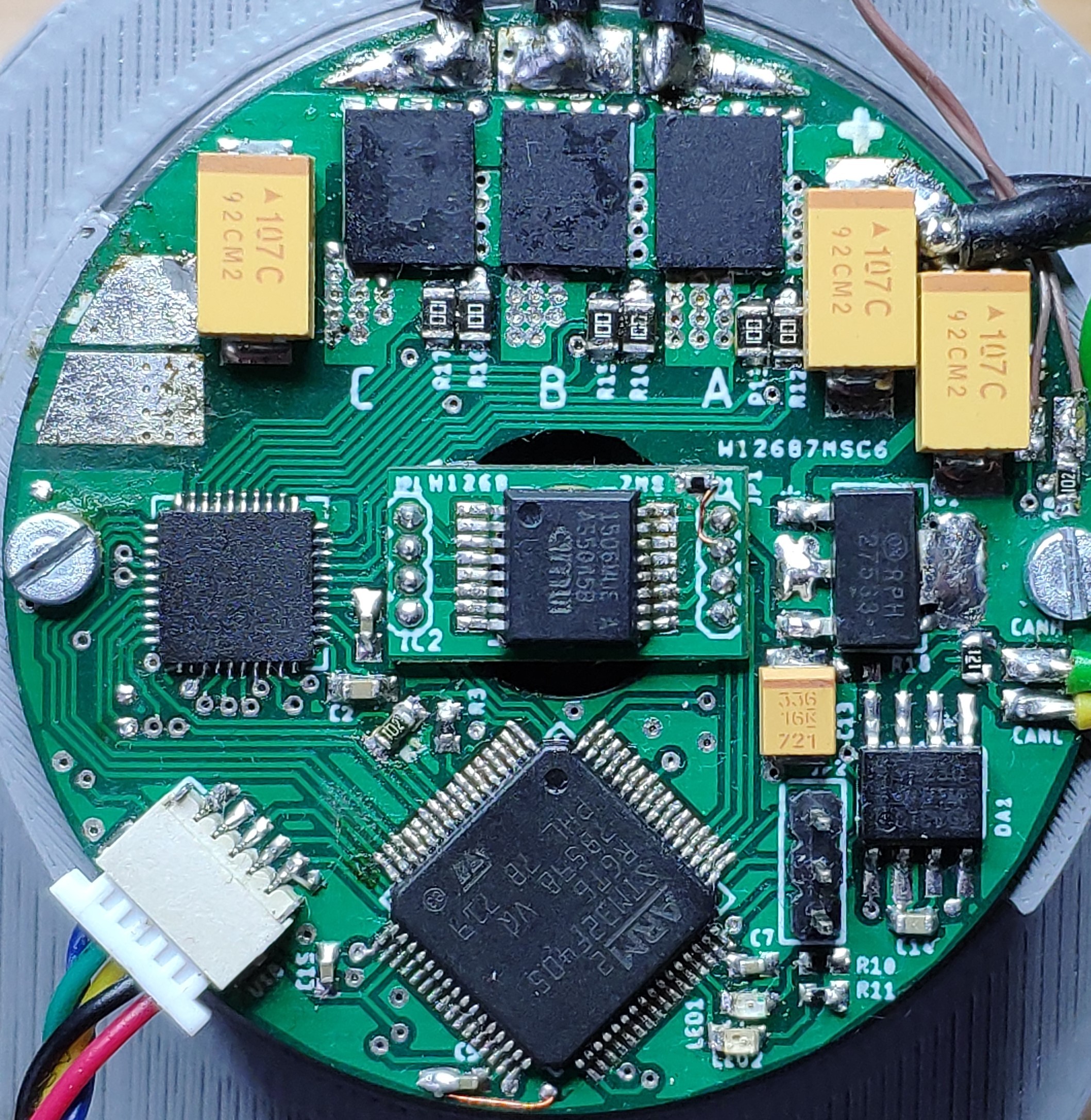
The board is mounted on top of the motor with two screws and the wires are soldered to the board directly as well as the output of the temperature sensor. Magnetic encoder is soldered on a little board to make space for the magnet glued on top of the rotor.
Testing and results
The controller worked fine when I first tested it, however when it came to current measurements they were quite “wavy”. The blue line on the screenshot from STMStudio is average of three phase currents, which should stay at fixed level :
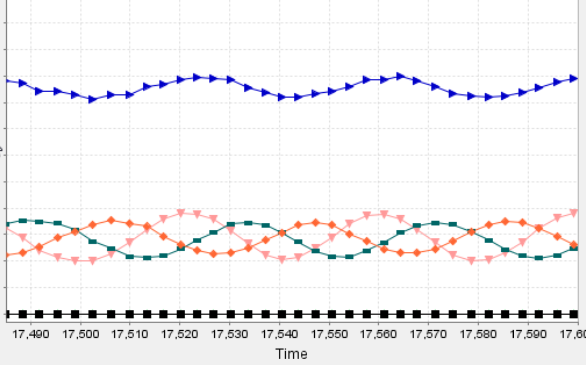
It turned out I did not make separate Kelvin-connections for each shunt, and instead I just shorted the pins to the ground. Besides the measurement side of the controller was all a bit messed up and I had to fix it in order to make the return path as short as possible:
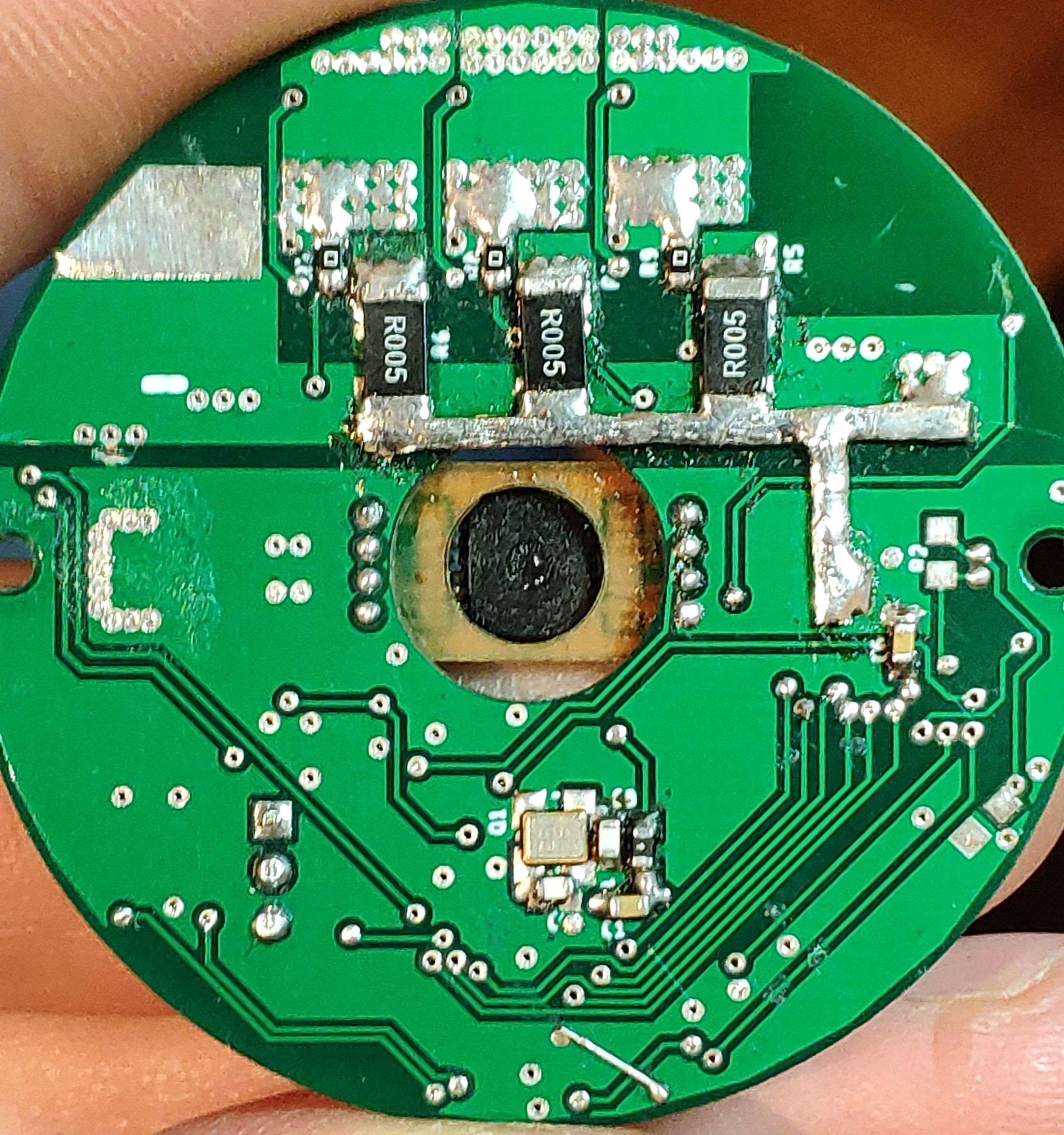
When corrected, the average wasn’t floating that much (grey line is the average) :
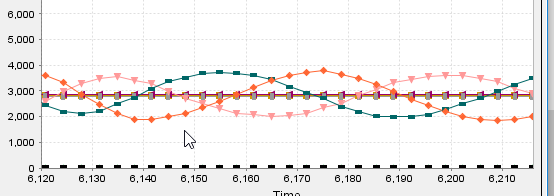
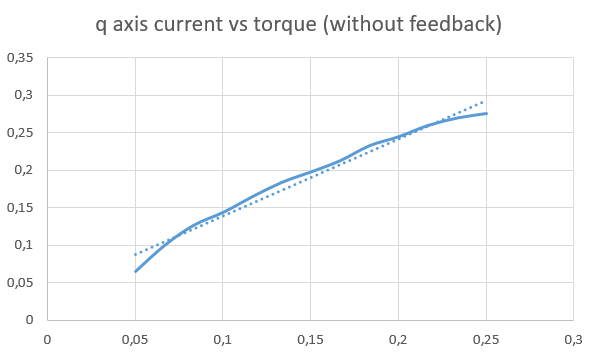
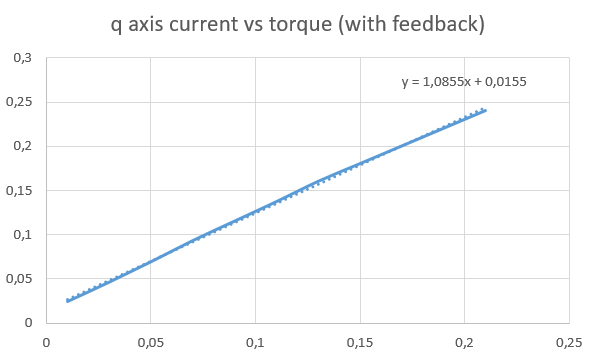
This modification turned out to lower the amplitude of the average current “waves” to an acceptable limit. The setup was ready for FOC algorithm with current feedback. The results were really promising. Below you can see two plots – first without current feedback (current in q axis vs torque) and the other with current feedback. As you can see the one with feedback is much more linear, thus it is possible to determine the torque constant.
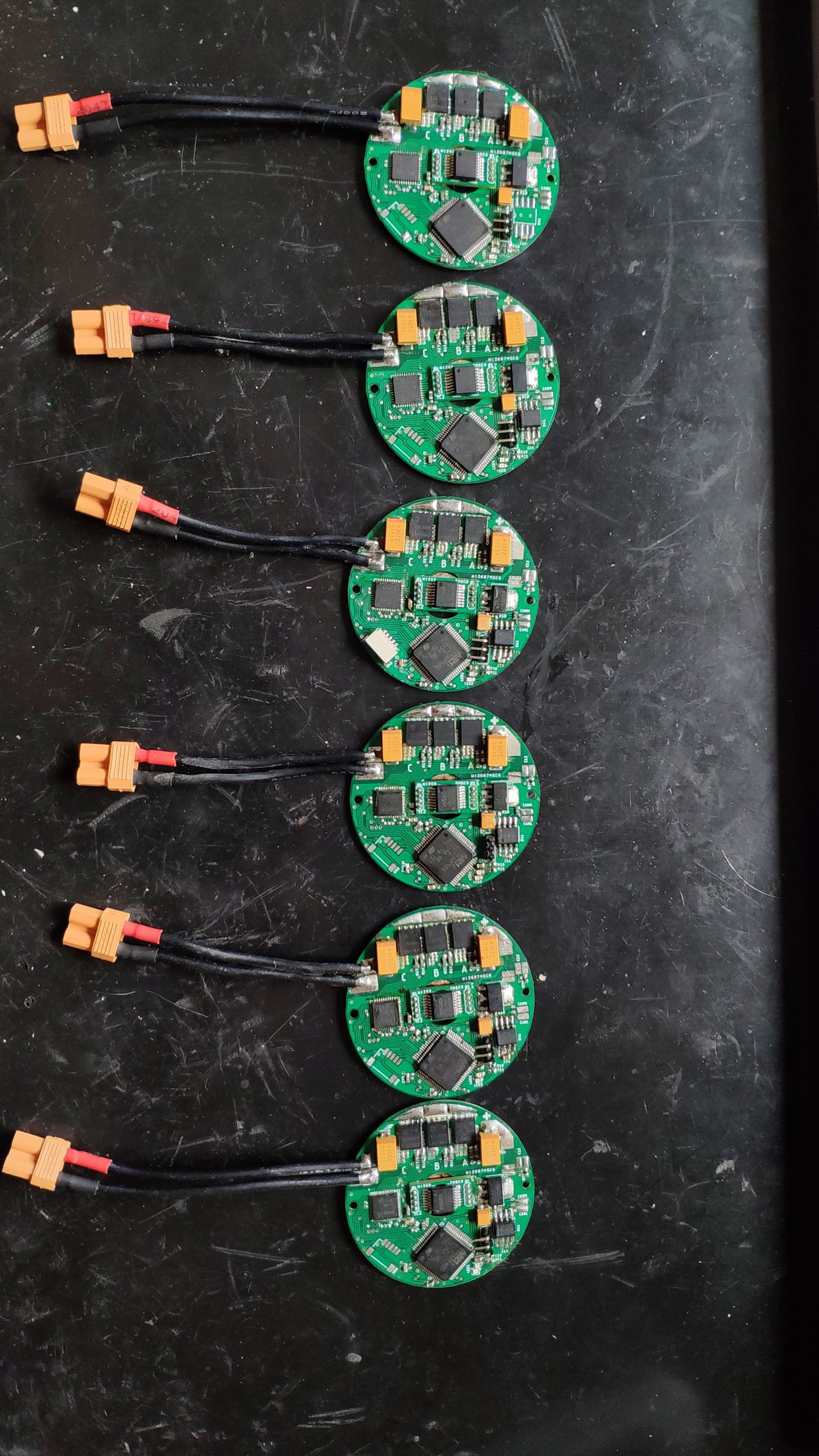
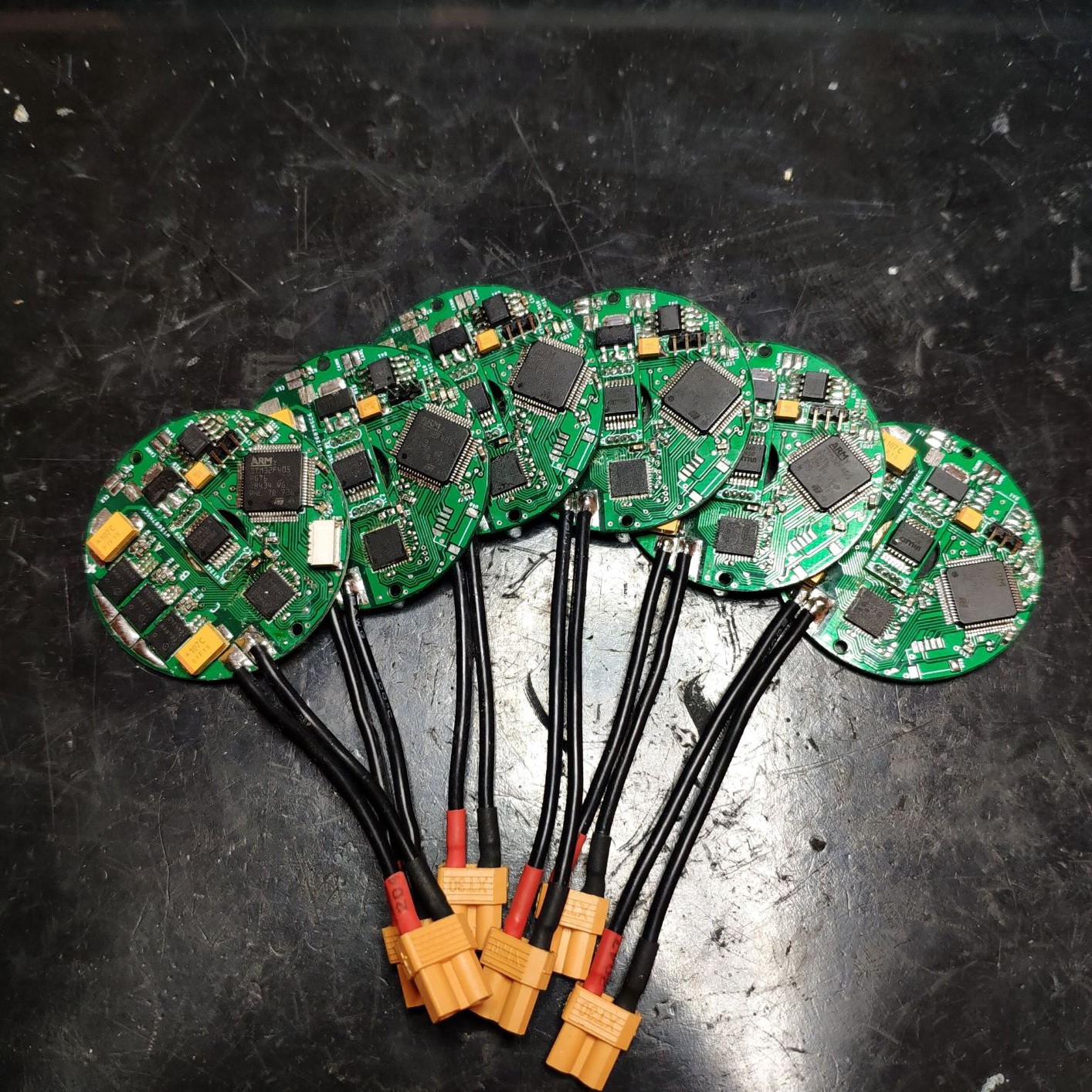
In the end some photos of fully soldered motor controllers for two legs:
I think this is all for now, next I’ll post some details about mechanical aspects of the robot.
Peter.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.