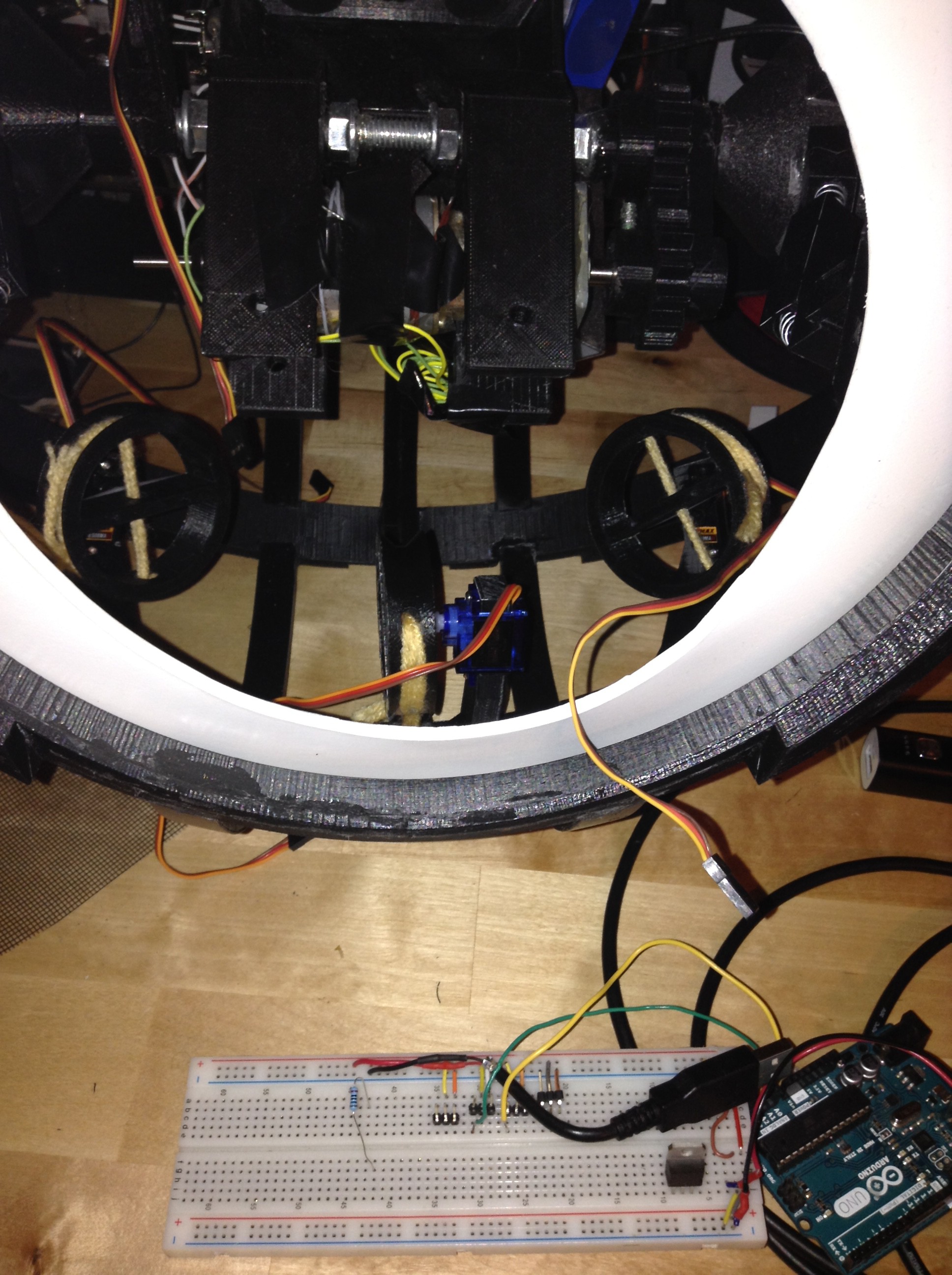
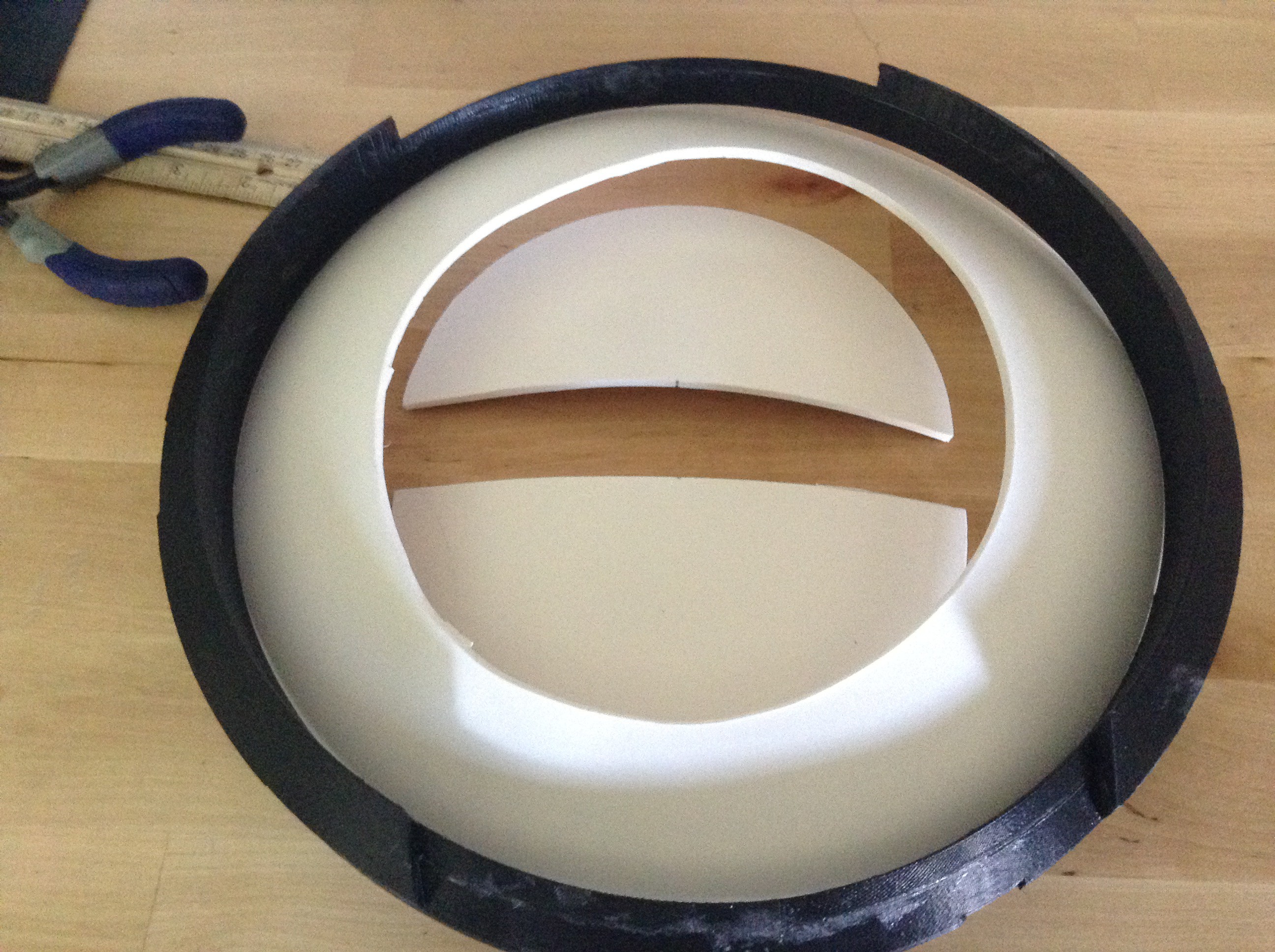
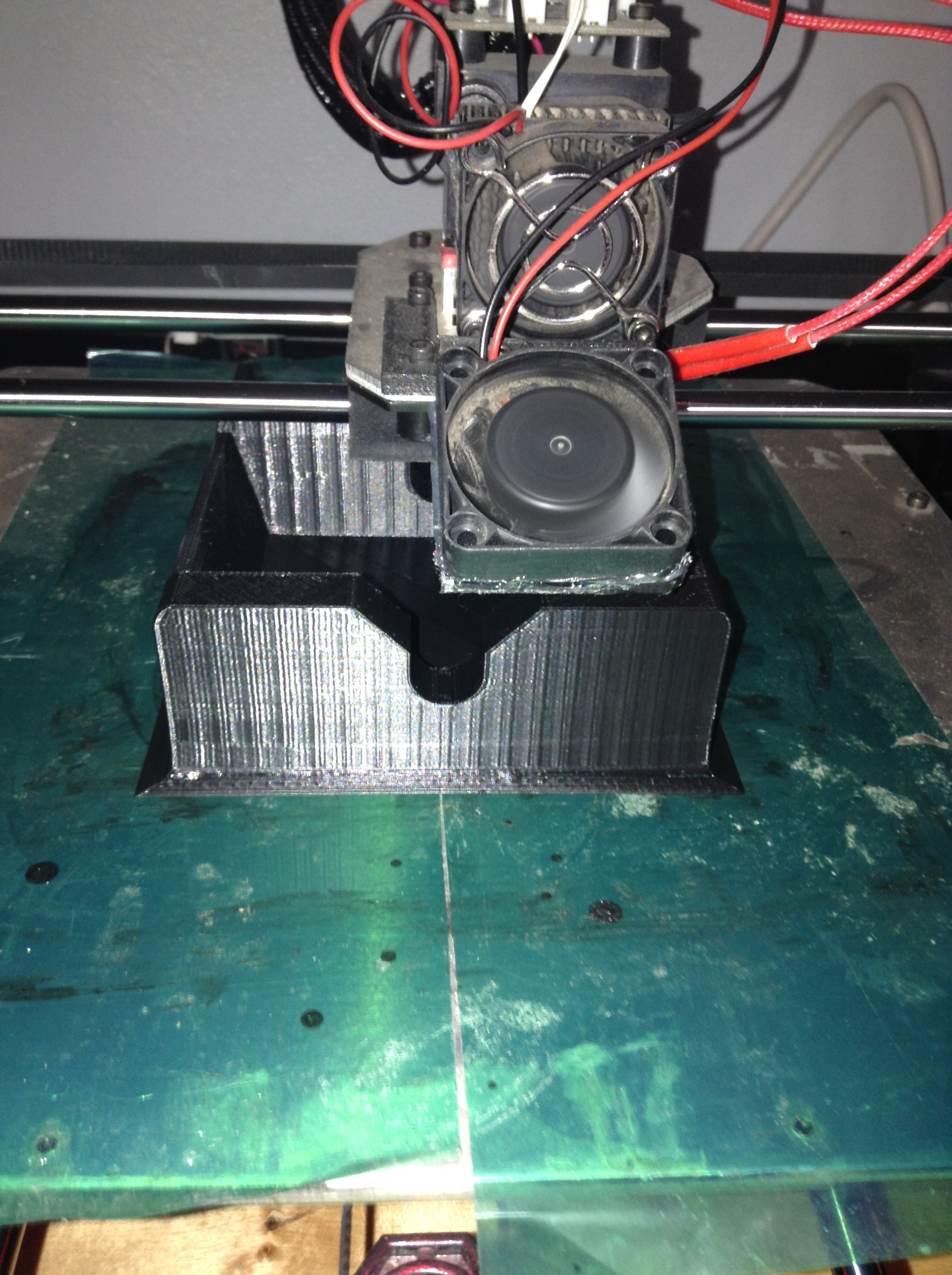
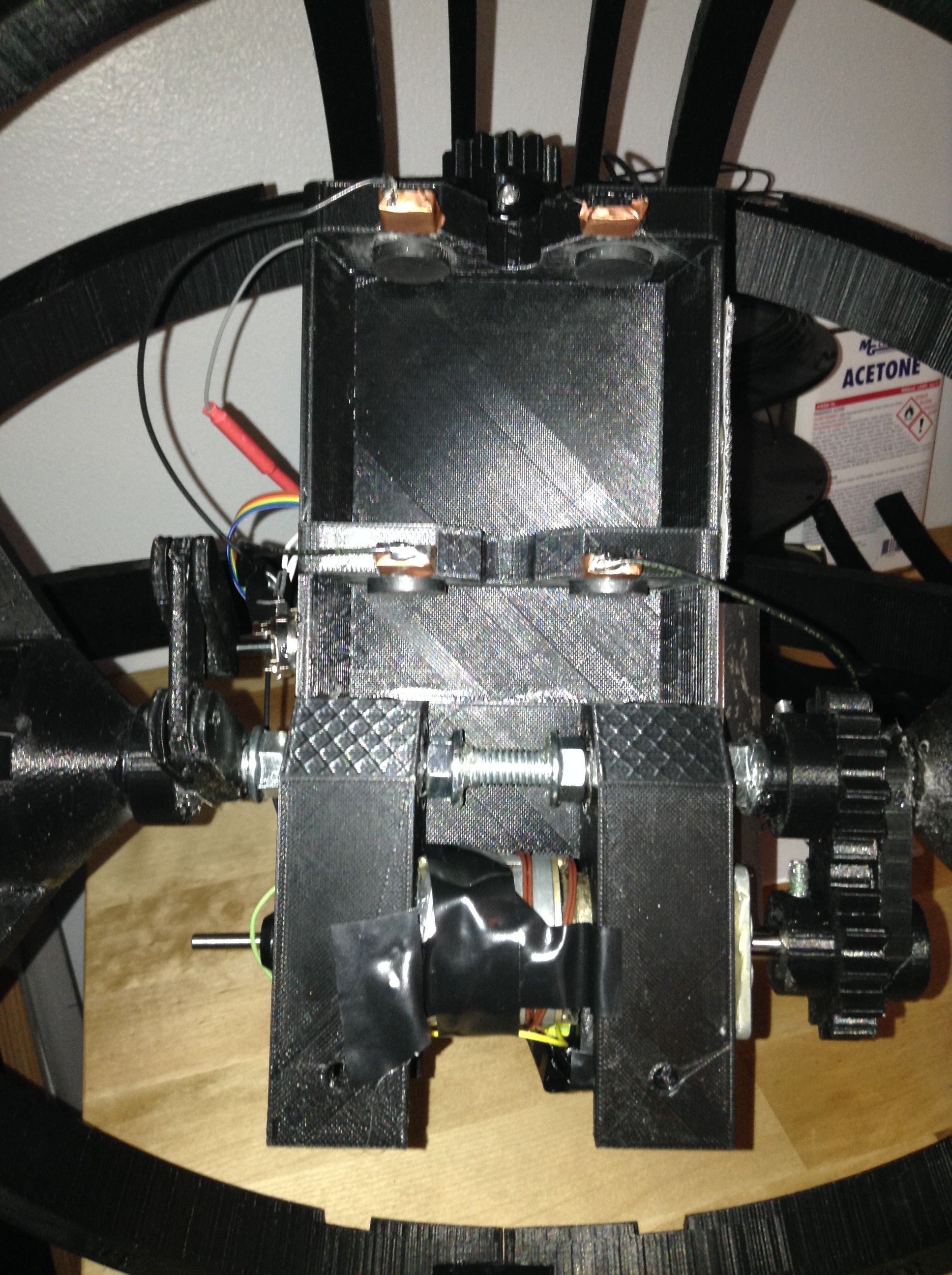
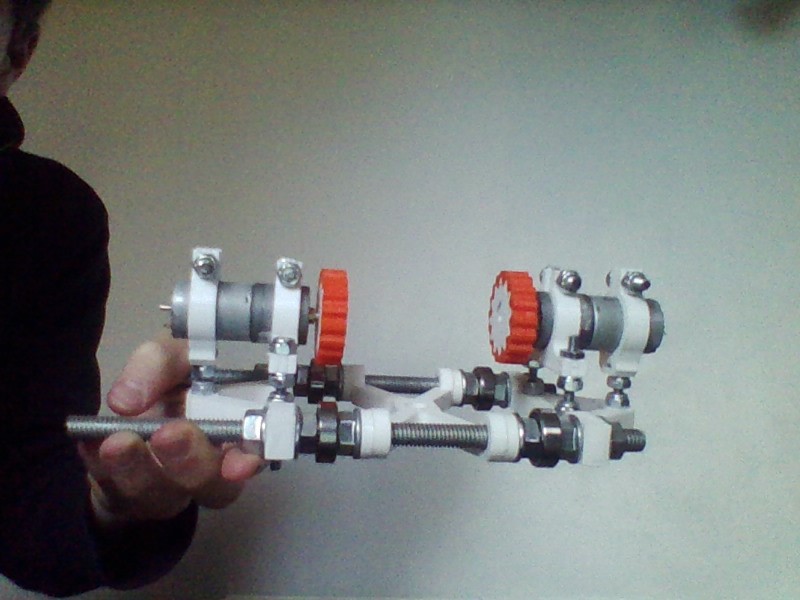
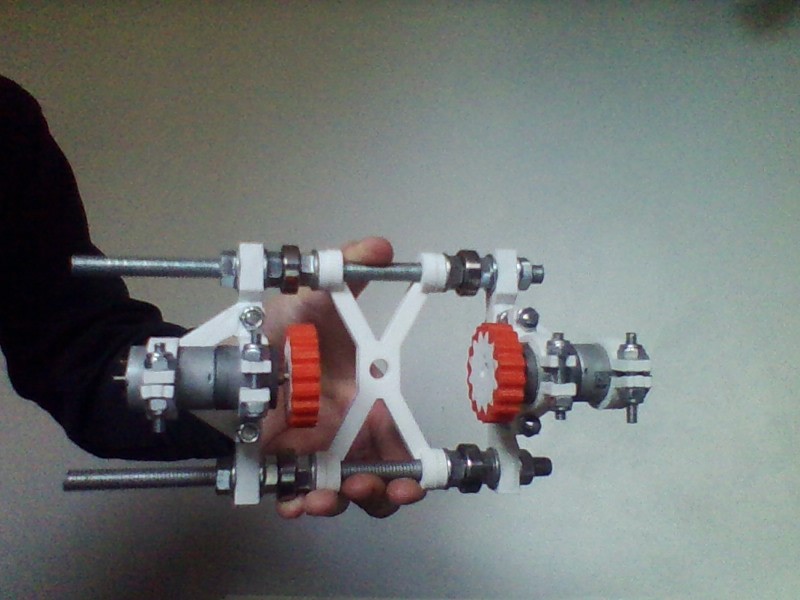
The goal of this project is to make something that looks like Wheatly from Portal 2 that runs on a track on the ceiling and says funny quotes from the game. I started by building the TAD or Track Attachment Device. Two motors turn 3d printed wheels (PLA core with Ninjaflex tires). It runs on a wooden track cut from plywood.
My design files for the TAD are available here: http://www.thingiverse.com/thing:1913433
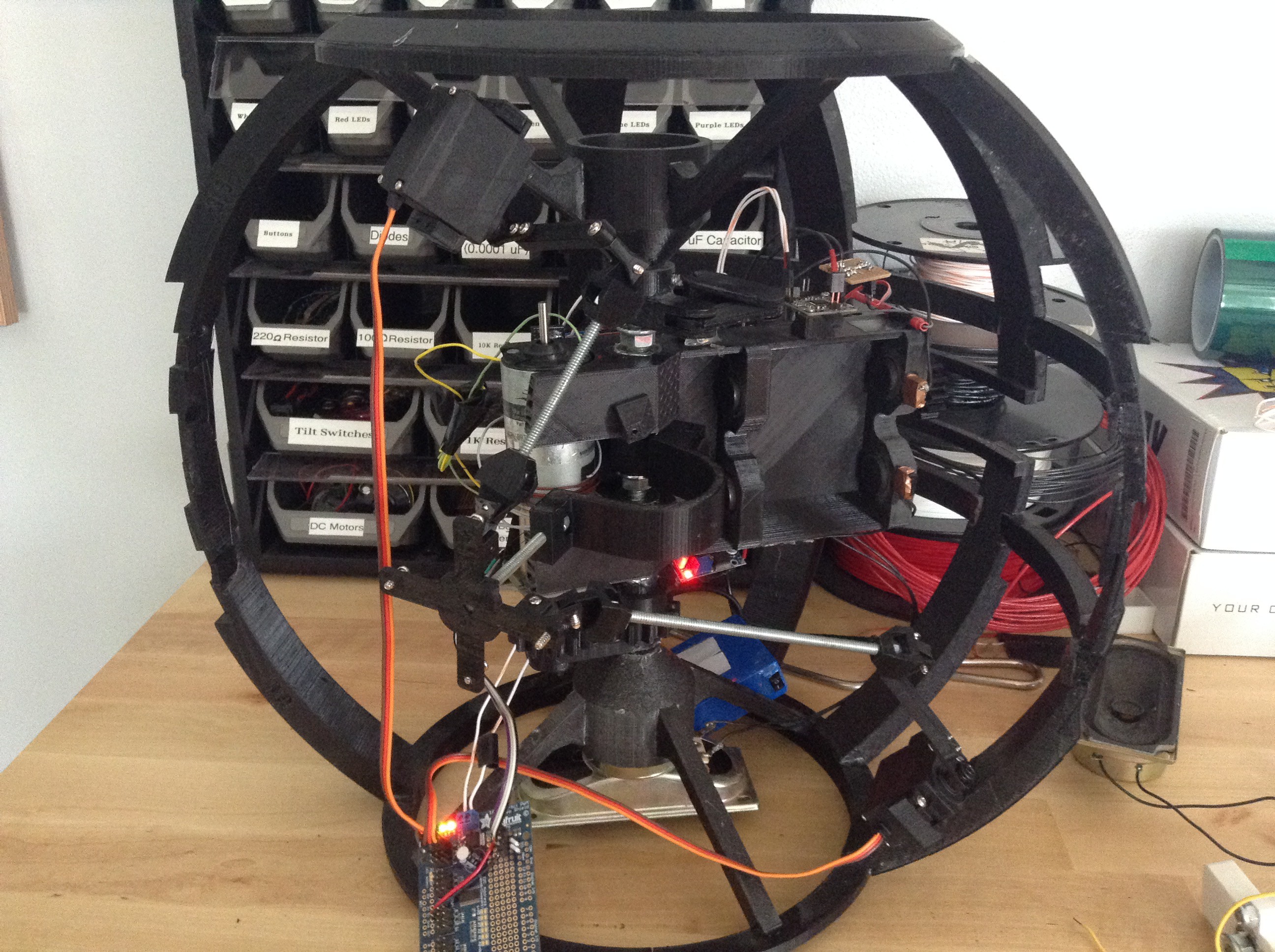
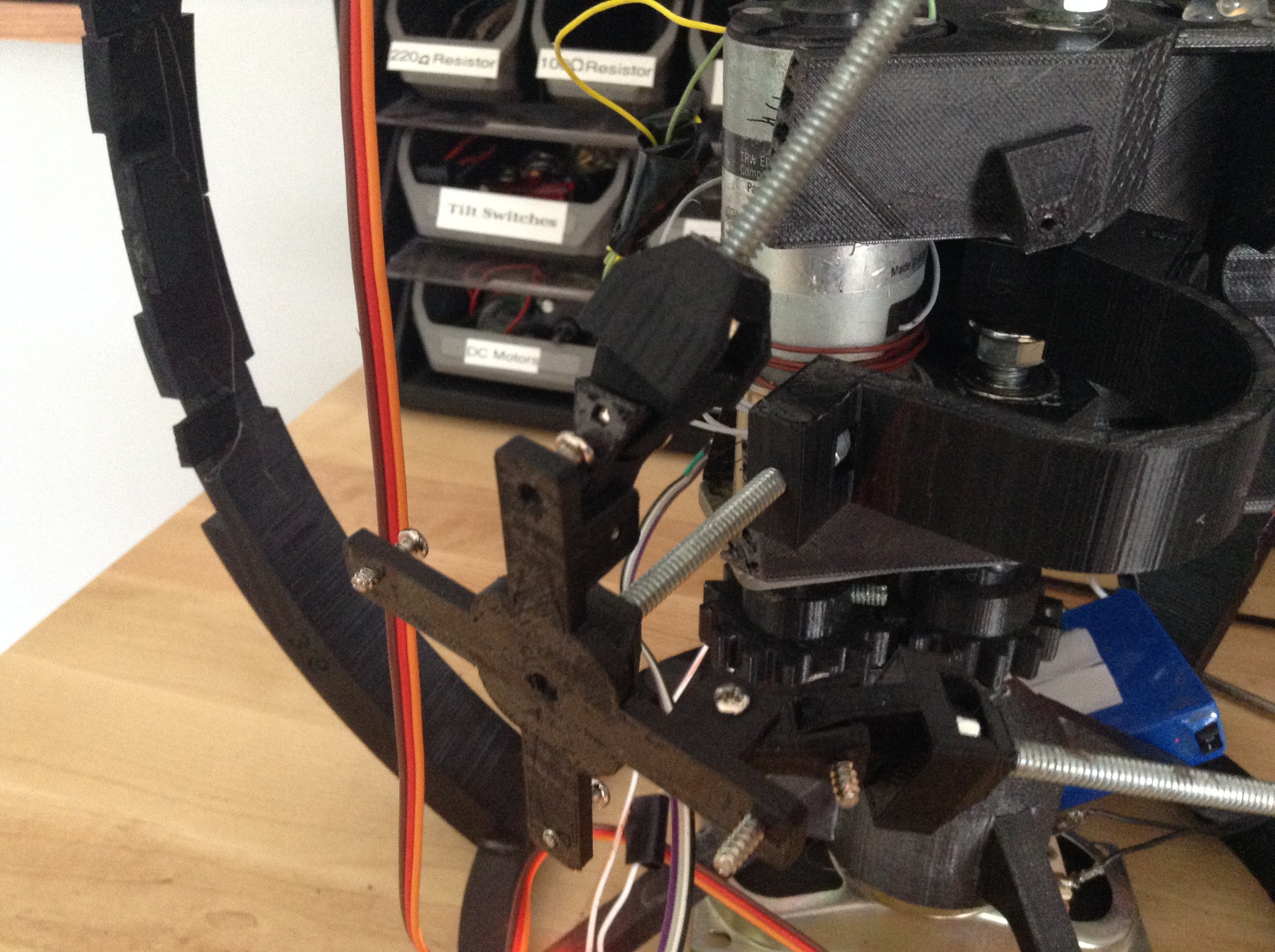
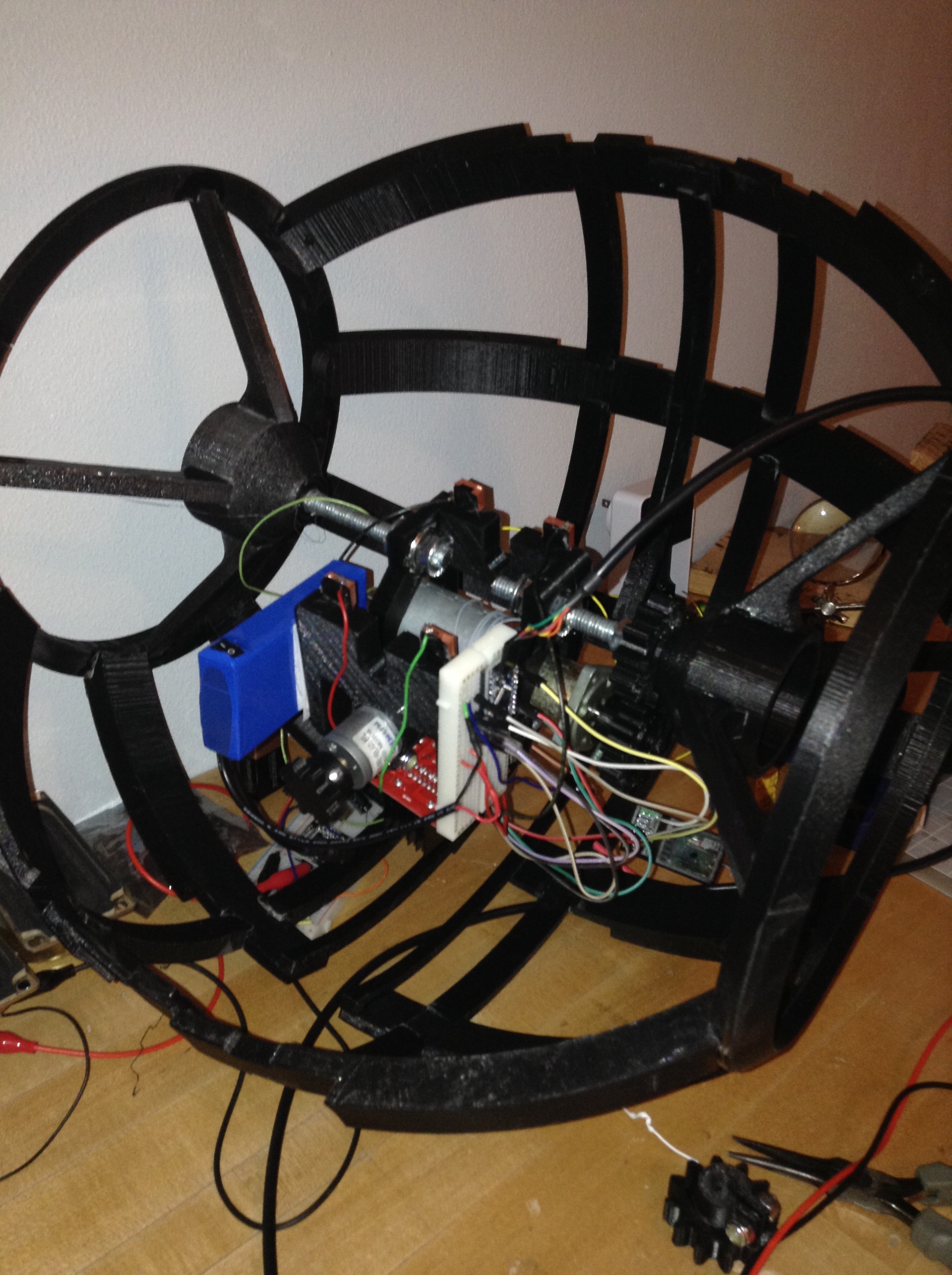
I have also 3d printed the frame of Wheatley out of ABS and chemically "welded" the pieces together with acetone. All of the motors and the speakers are controlled using Arduinos. It will be both remote controlled and autonomous.
My design files are available here: http://www.thingiverse.com/thing:2047627
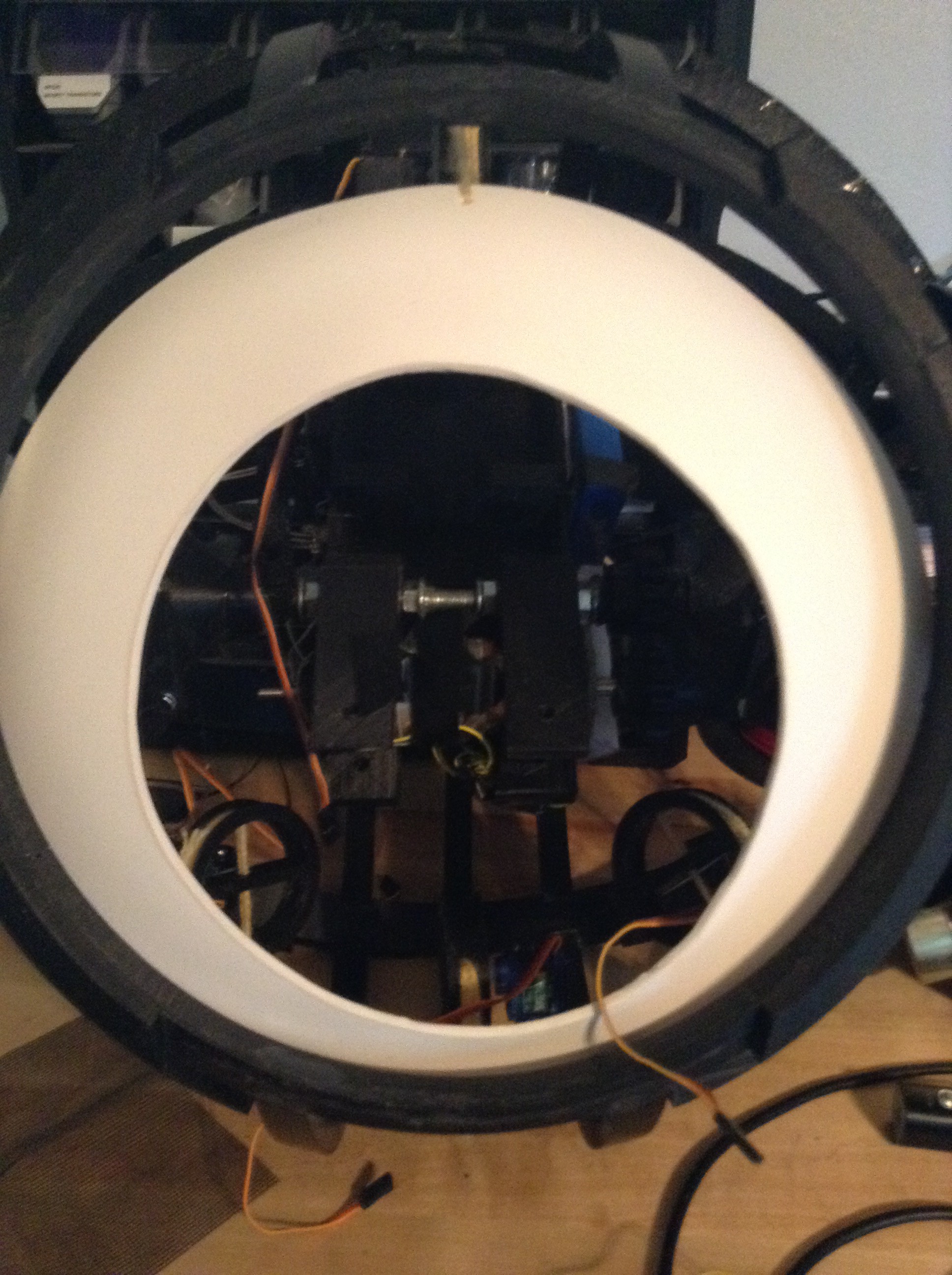
I am currently working on building "skins" for Wheatley and programming motions to go along with his quotes.
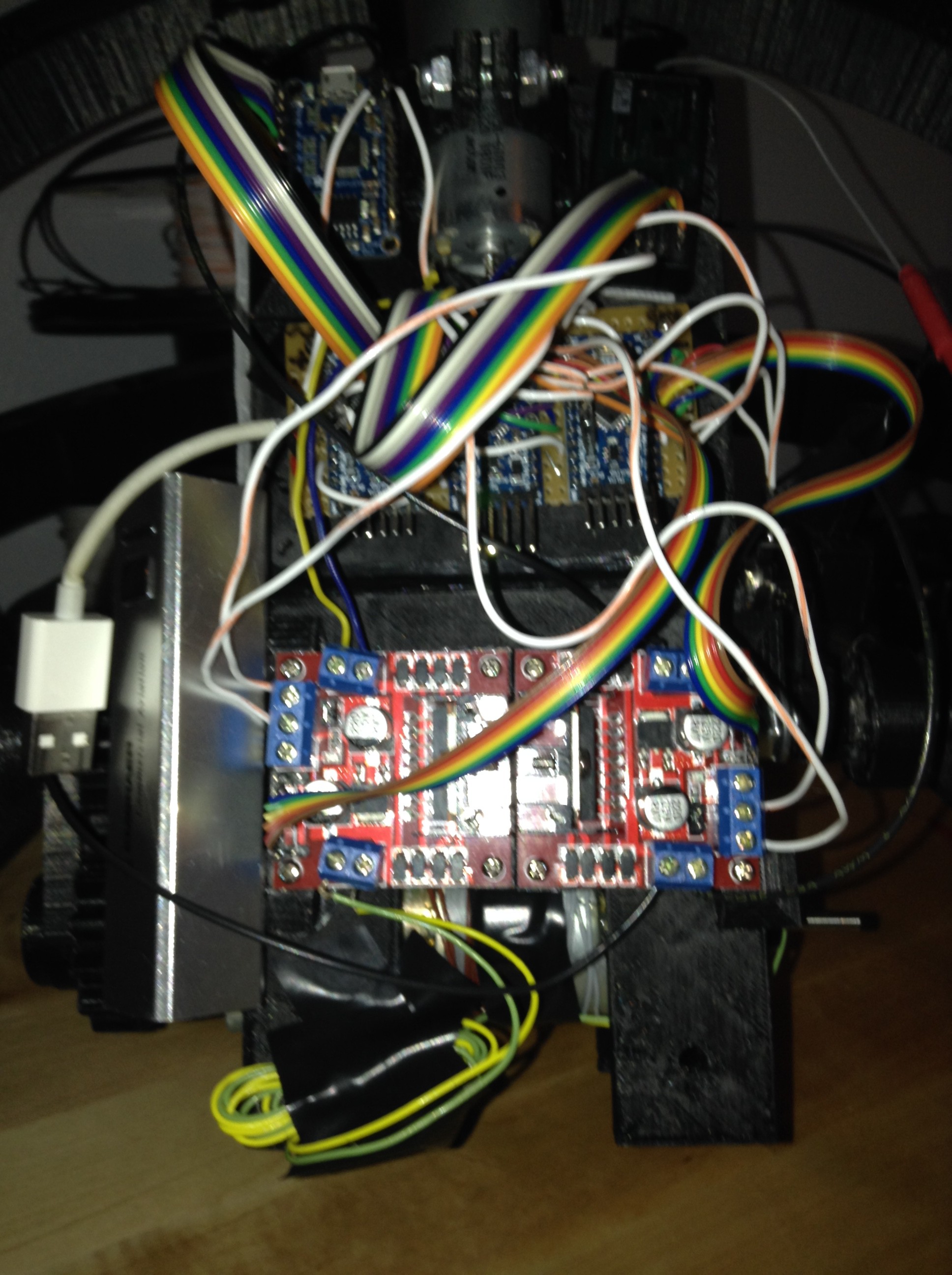



 Temporarily Gluing Electronics in Place
Temporarily Gluing Electronics in Place


 Maximiliano Palay
Maximiliano Palay
 Brian Brocken
Brian Brocken
 barb
barb
 Kenneth Zaborny
Kenneth Zaborny