 Mihai Oltean
Mihai OlteanCurrently the leg and the platform are powered by 2 RoboClaw boards. It is difficult to add extra sensors to this board. It is easy to add encoders, but for other sensors one has to use another microcontroller (like Arduino) to read them and then to send proper commands to RoboClaw.
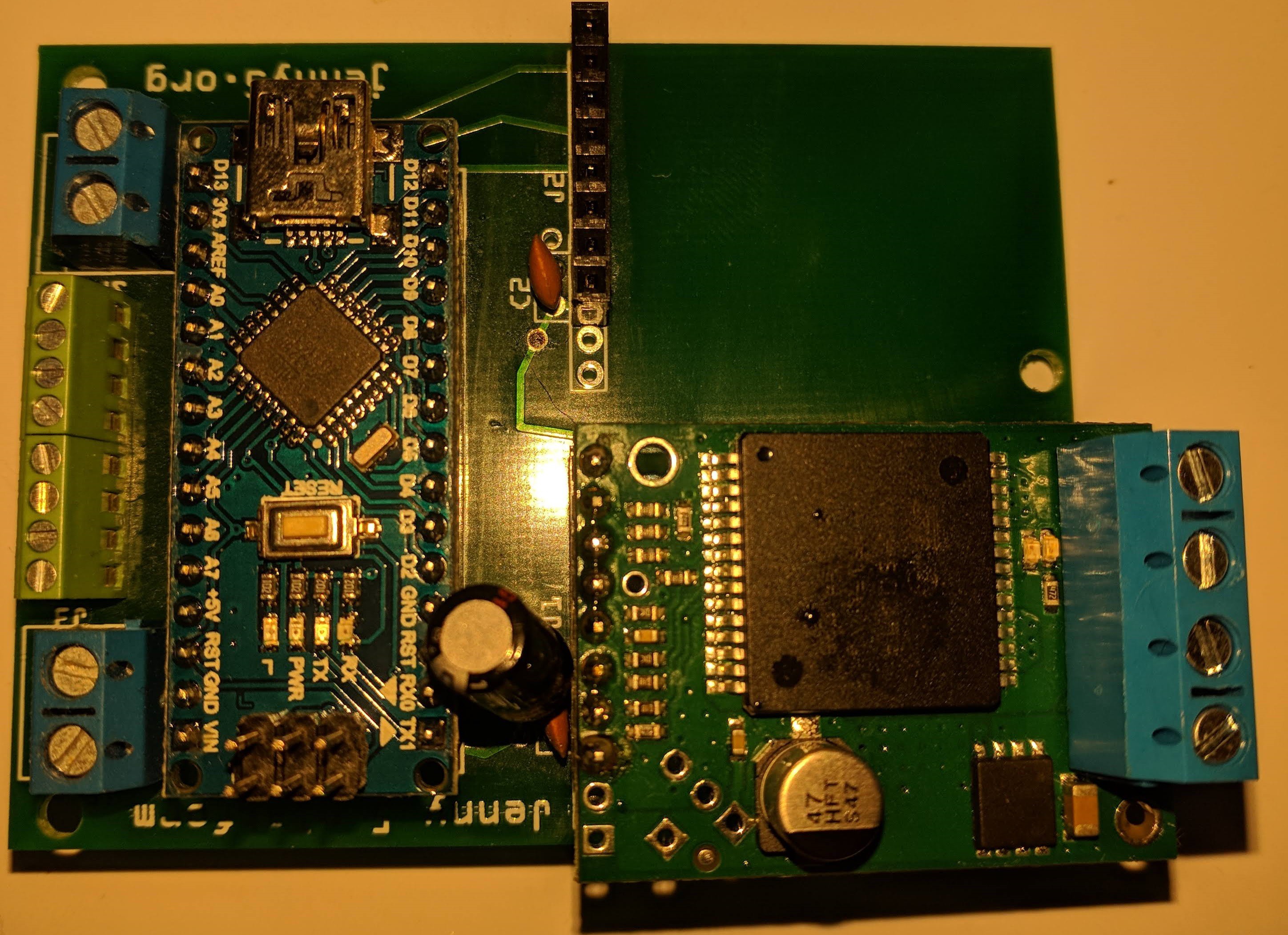
Because of that, I have decided to design a new board which uses Arduino Nano as microcontroller and Pololu VNH5019 as motor driver. There is another small advantage if using this driver: if one fails due to some short circuit, the other ones will not be affected (see few posts ago on how I lost 2 RoboClaws).
Below is the picture of the new board with components soldered. Currently it is only 1 driver, but the second one will be added after testing.
Note that testing will take few more weeks before they will take place because first I have to update the Scufy (Arduino ) firmware, then Scufy-Lib and so on ... so it will take some time to do that ...
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.