 Mihai Oltean
Mihai OlteanI just finished the modifications to the HTML5 client and websocket server required in order to control the right arm. This is the first time when support for both arms has been implemented.
Updates have been pushed to the corresponding GitHub repository.
Testing will begin soon. What is left now is to wire all sensors to PCB.
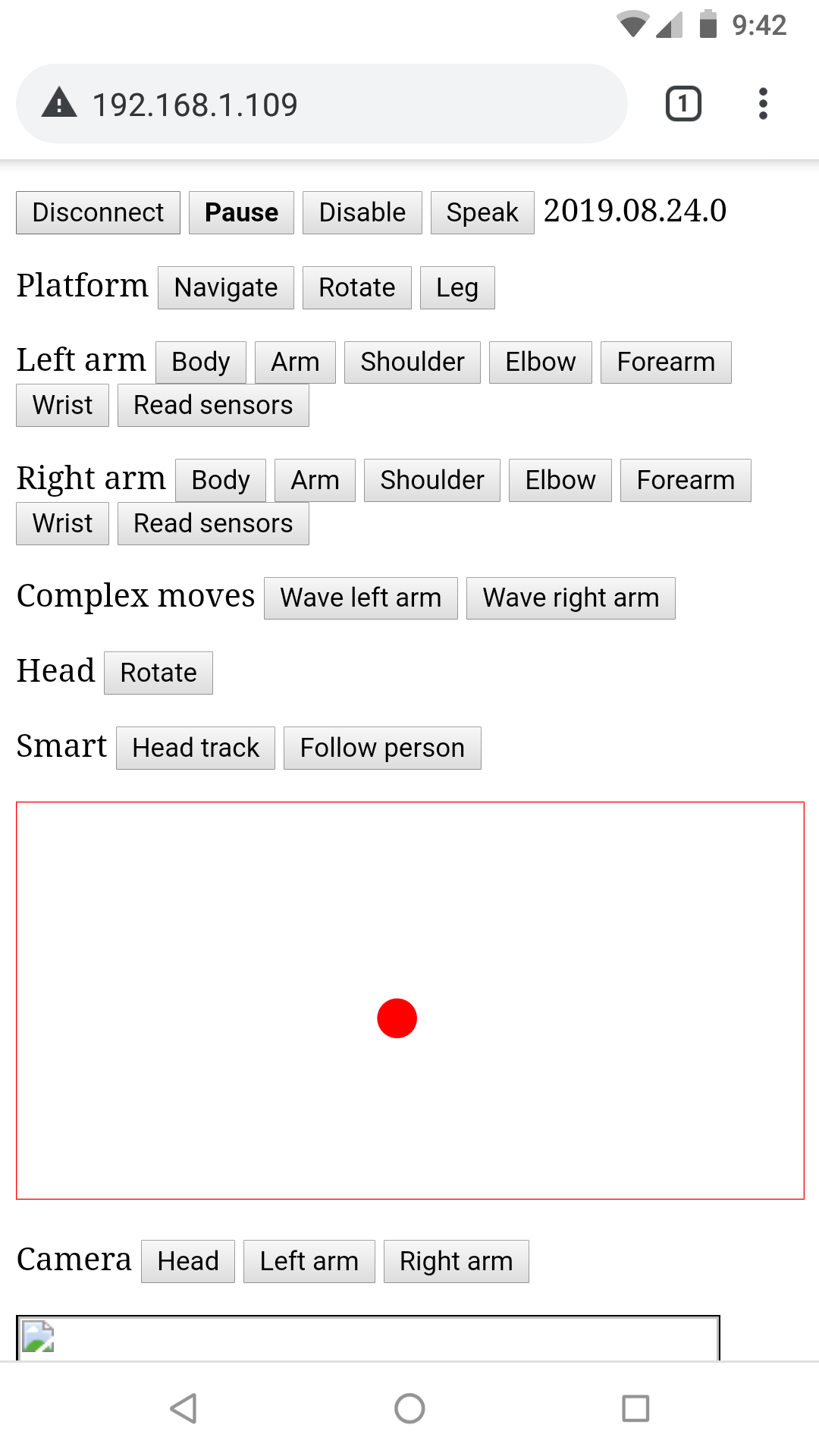
Here is a picture from the HTML client:
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.