 matop
matopOverall structure
Building a complete robotic frame is an interesting challenge but could be really time consuming. In order to focus on project's goals, I decided to use TurtleBot3 plates which present many advantages: numerous holes offer good modularity and molded plastic used present a higher stiffness than most 3D printer materials.
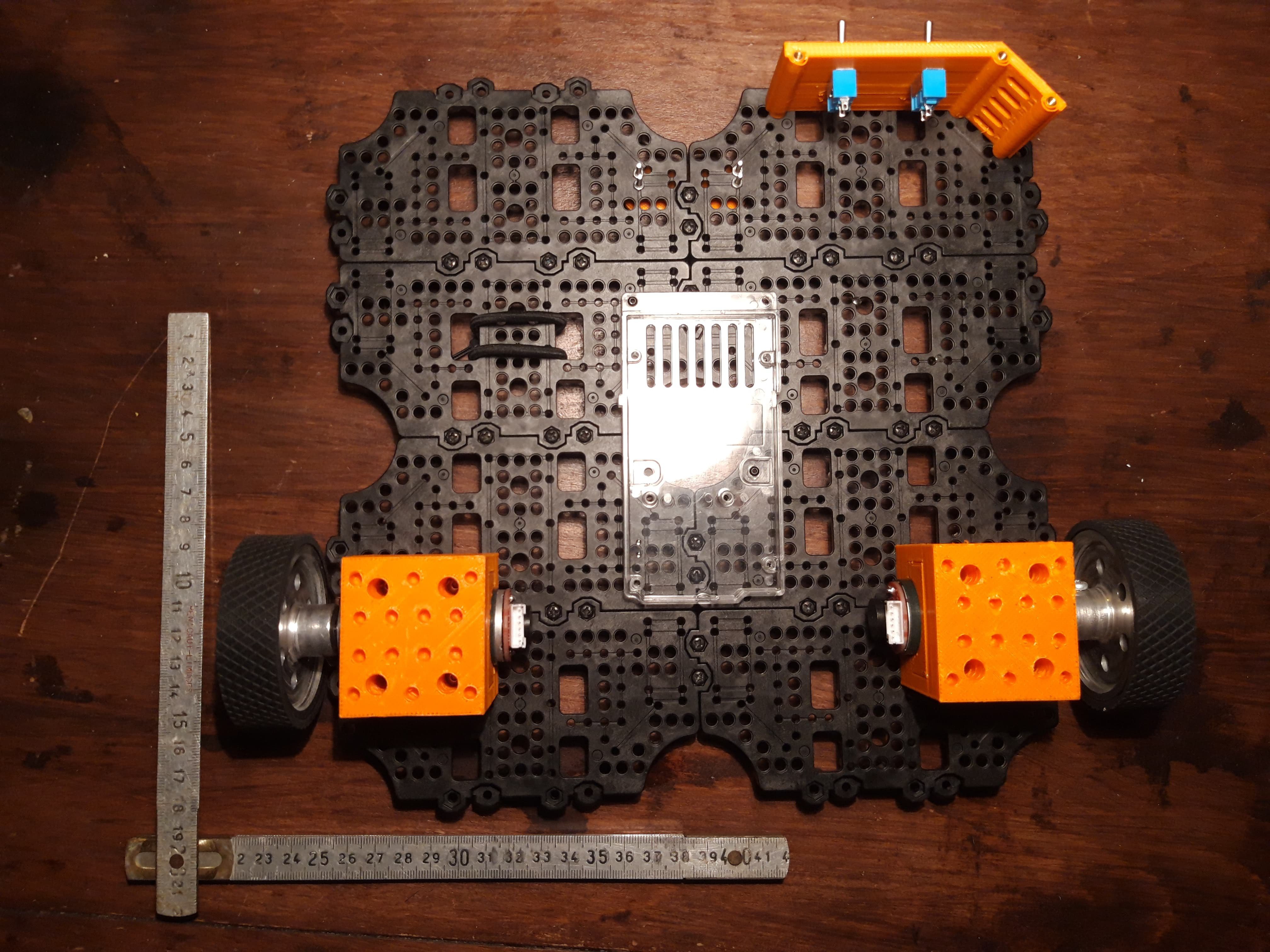
Motor holder
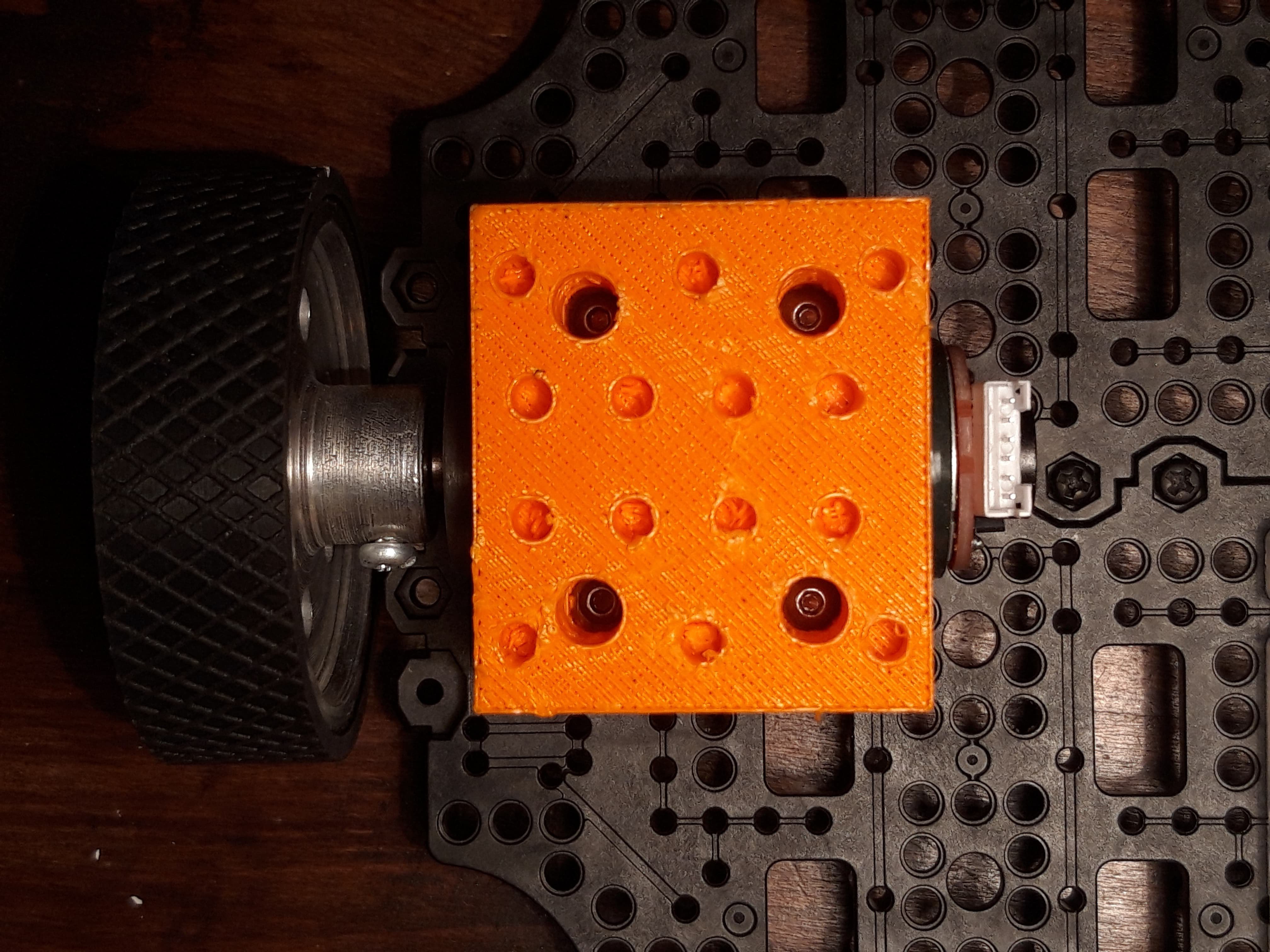
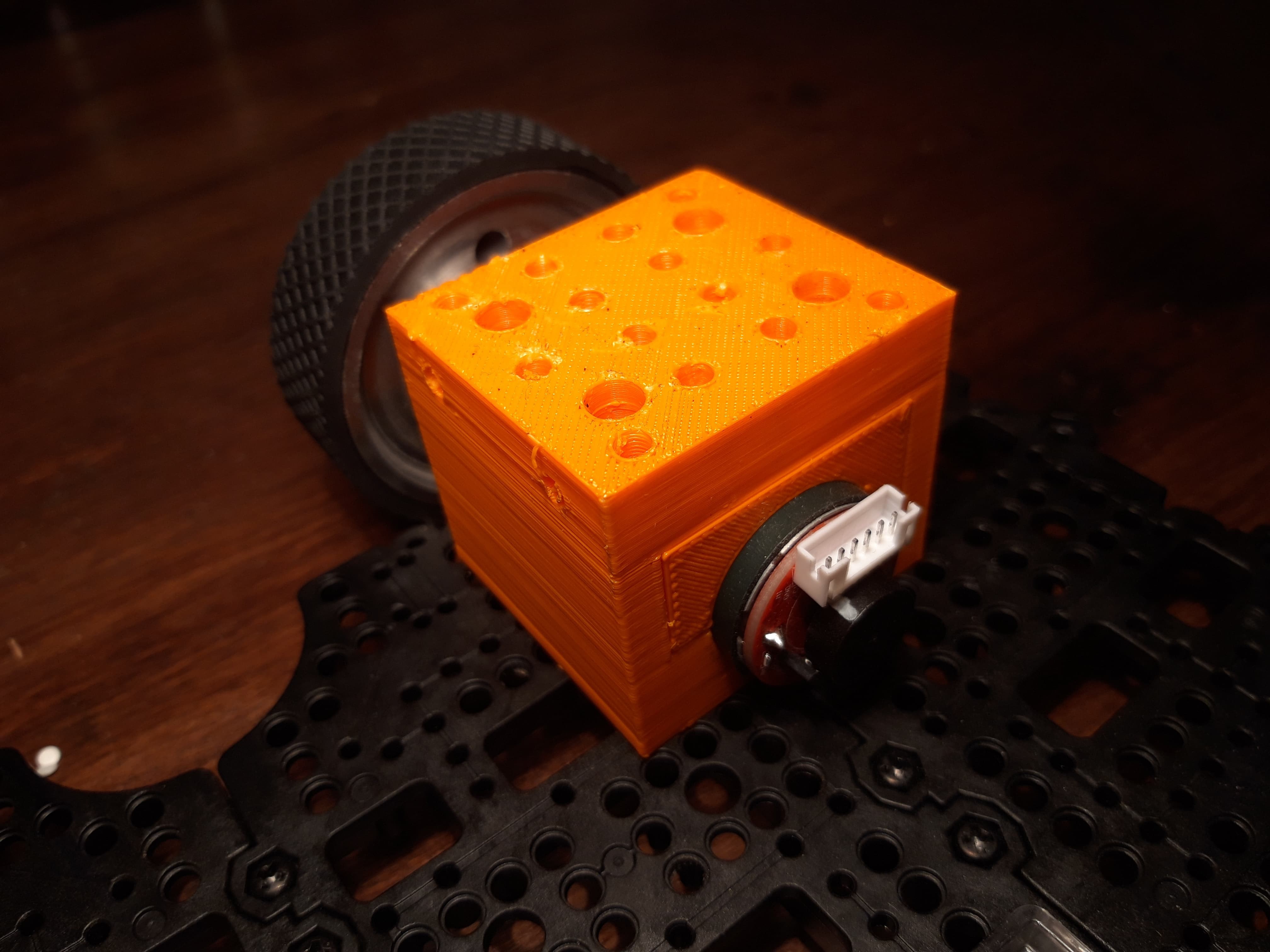
Motor holder are composed of two parts that tighten motor with 4 screws like a vises. Motors are soft mounted to prevent vibrations that cause noise.
IMU holder
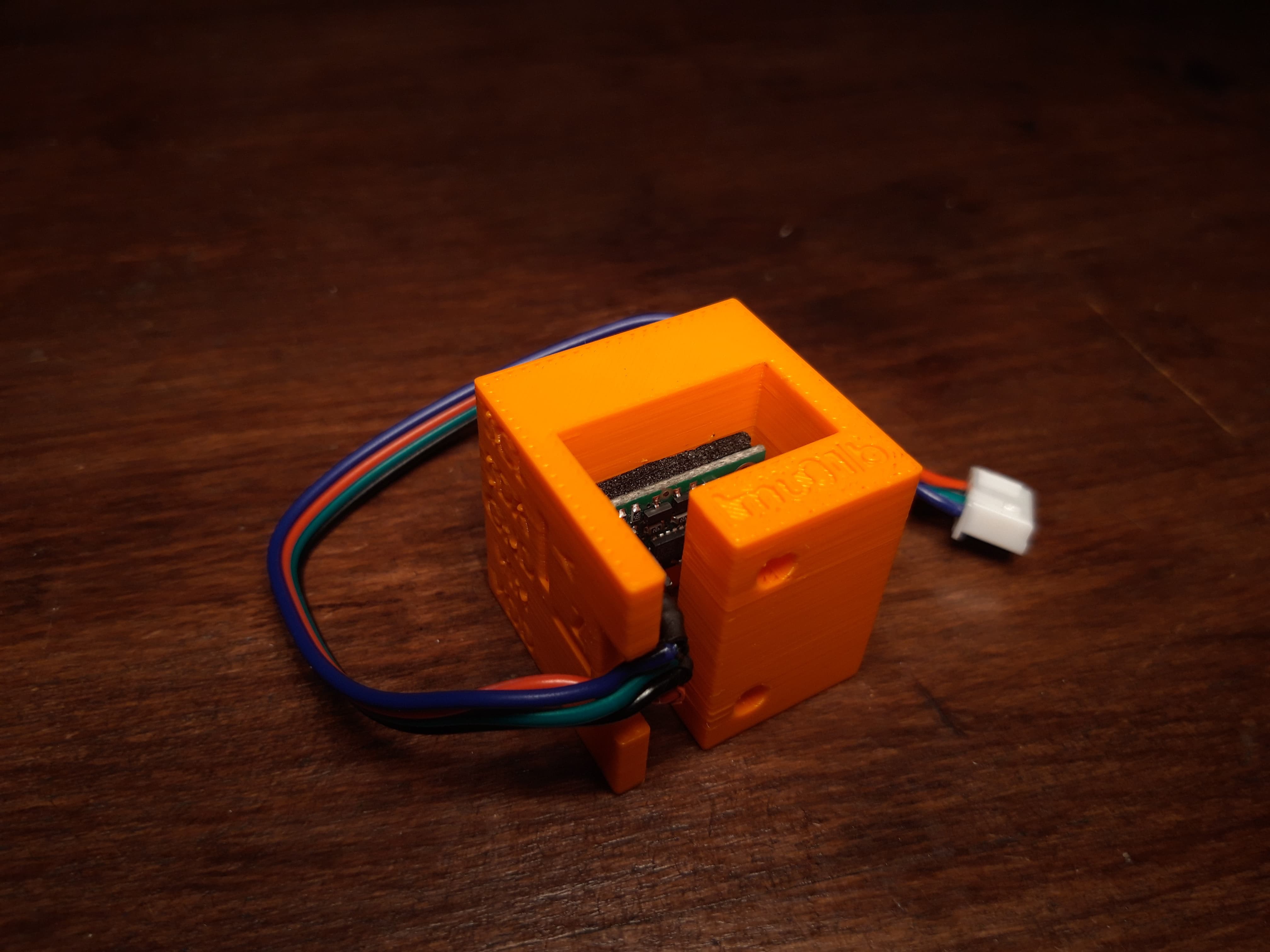
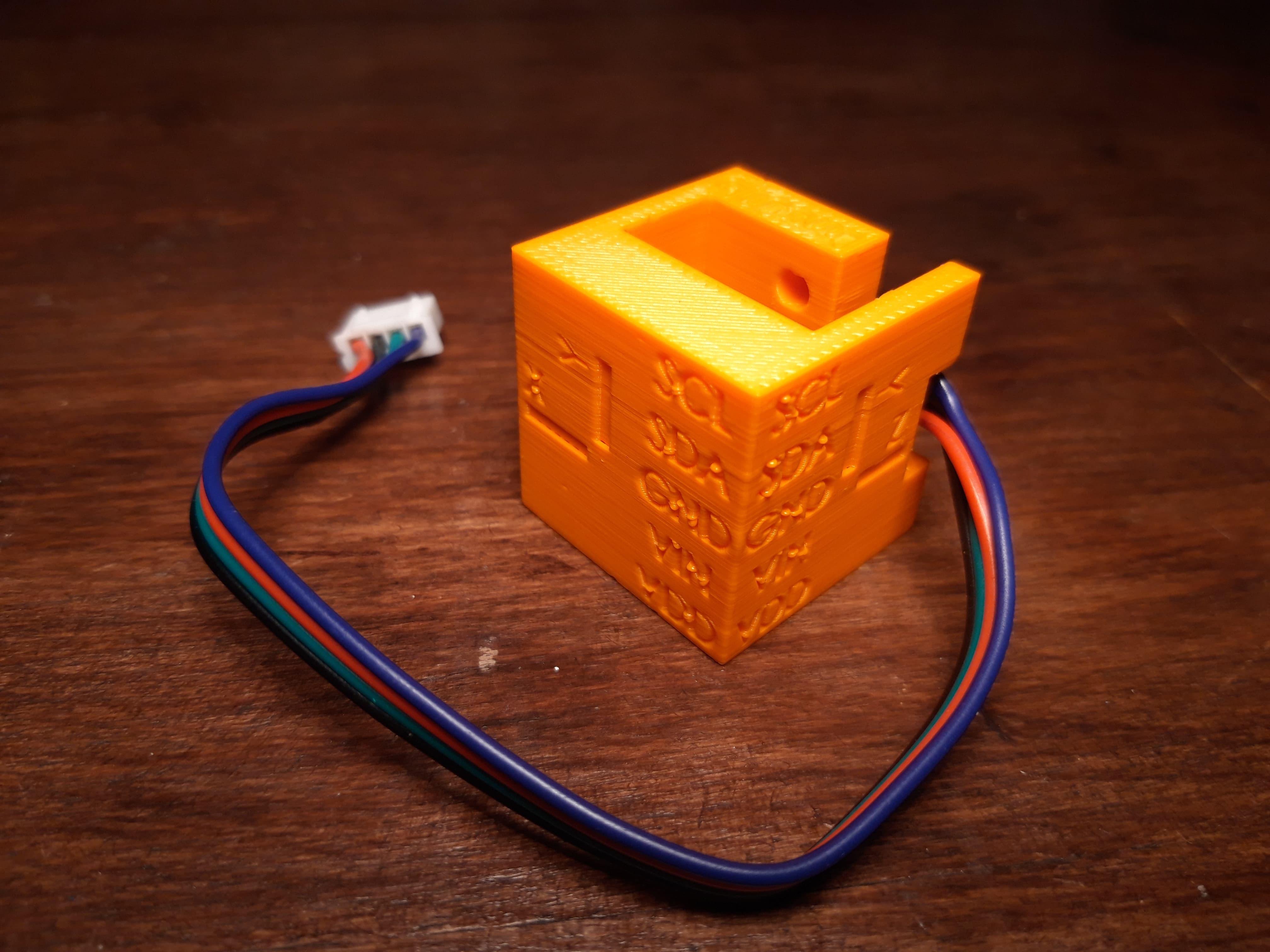
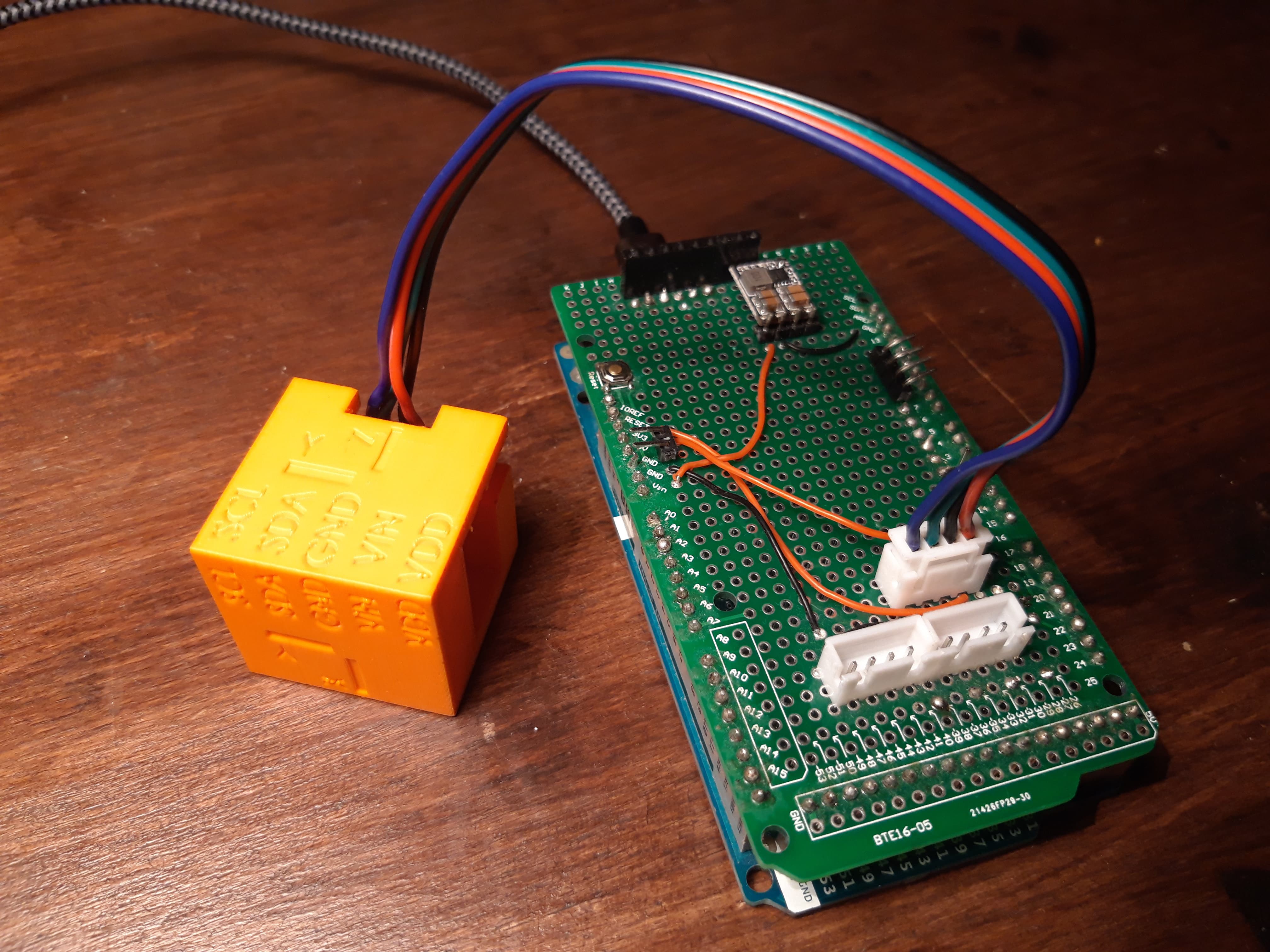
This cube will be used for algorithm tuning and calibration methods development, some holes with M2.5 inserts allow to fix it on the TB3 plates. As explain in a previous log, IMU is soft mounted with "thick tape".
Here is also an overview of the Arduino Due with its proto board.
Caster ball

Not really a ball, but should do the job.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.