0%
0%
custom bldc motor board using fpga
custom pcb for controlling a bldc motor optimally
 Simon Trendel
Simon TrendelBecome a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests
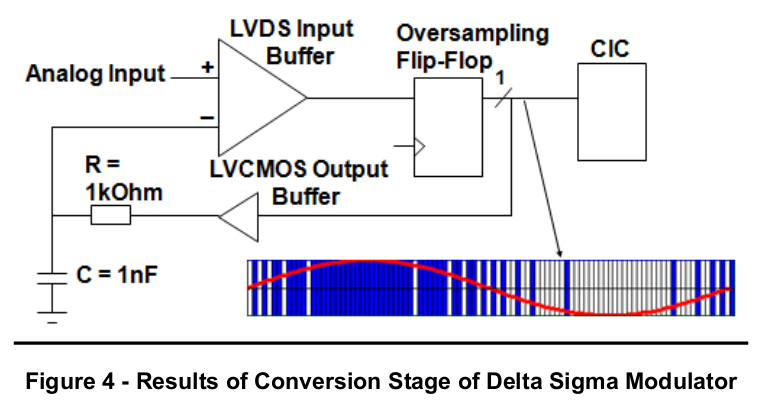
 Before we go down the rabbit hole of digital filter design (eg following a guide like
Before we go down the rabbit hole of digital filter design (eg following a guide like 

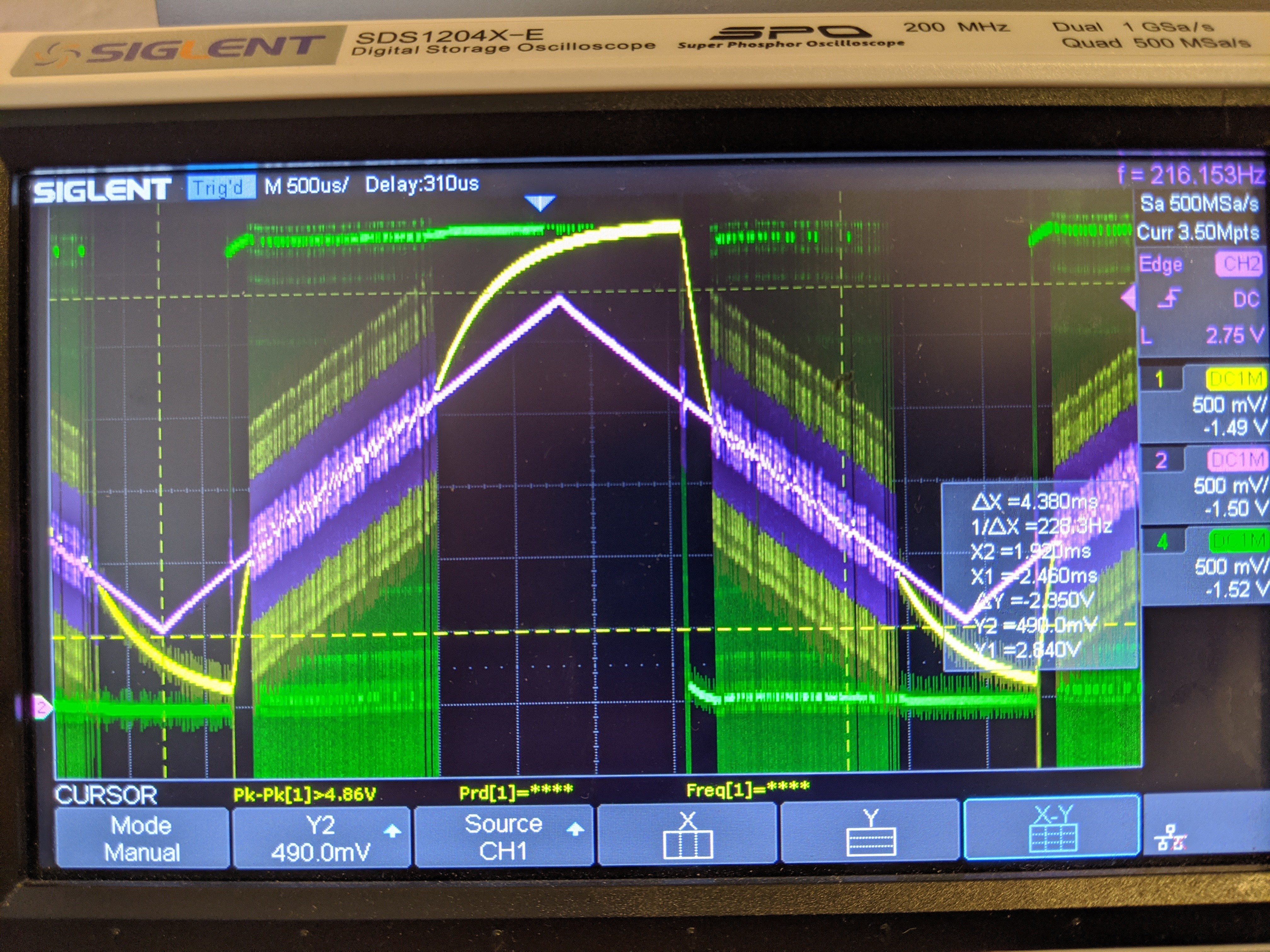
 The second test was 10000 cycles of rolling up the tendon three times, within 2.5 seconds, then going back to 0 within 0.5 seconds:
The second test was 10000 cycles of rolling up the tendon three times, within 2.5 seconds, then going back to 0 within 0.5 seconds:






 Simone Tolomei
Simone Tolomei
 ridonkulus
ridonkulus
 SUF
SUF