 ottoragam
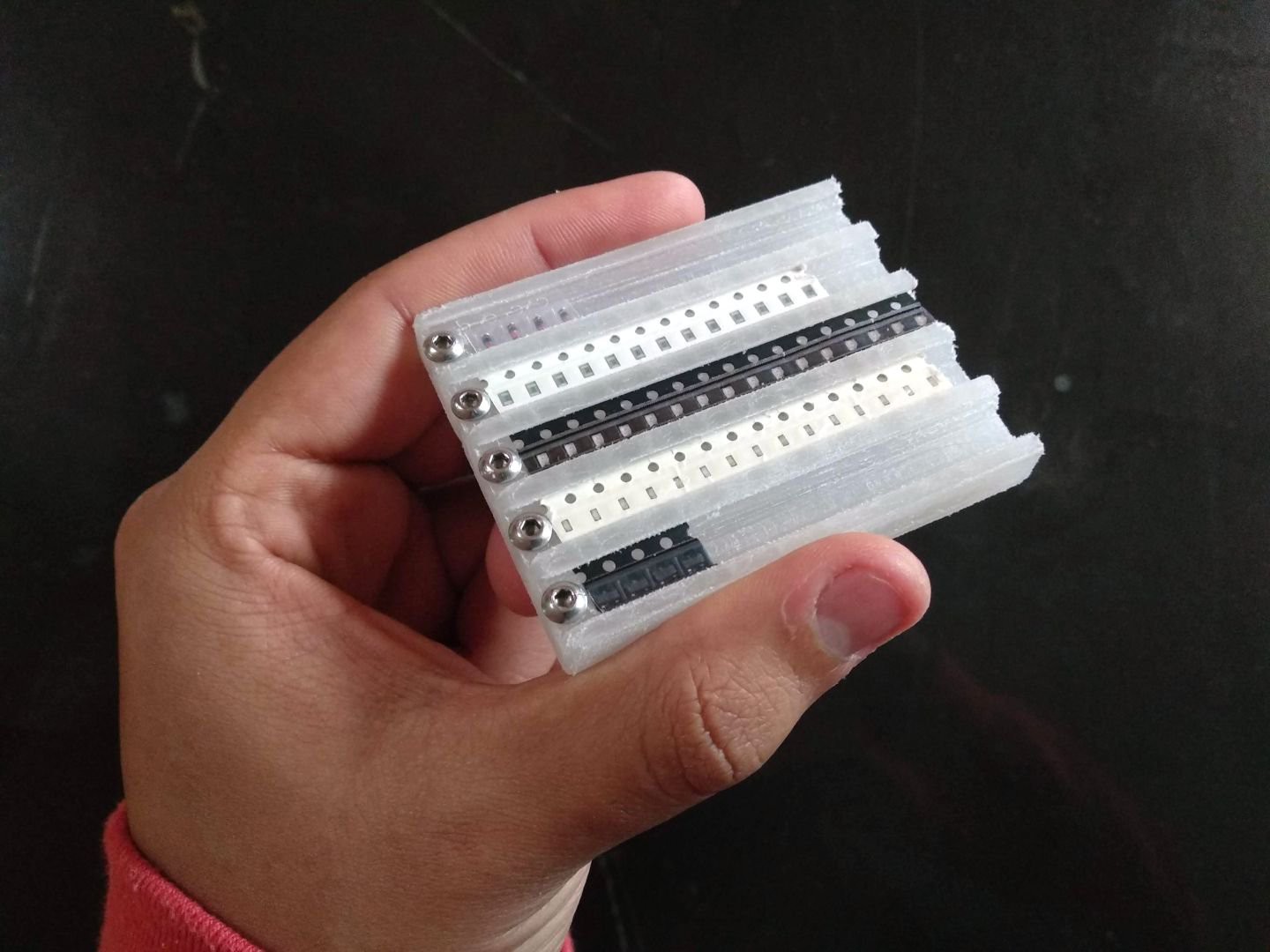
ottoragamPrinted circuit board assembly is a critical part of building electronic devices. Prototypes are often built by hand, and high volume PCB batches are normally handled by specialized machines in a factory assembly line. But there are several cases where hand assembly is slow, difficult and very tedious, and off sourcing the work to a factory is not cost effective or has some constrains that make this route undesirable.
Having a personal Pick and Place machine is a way to solve this issues. While not as fast as an industrial machine, it easily beats hand assembly. The goal of this project is to provide an affordable Pick and Place machine.
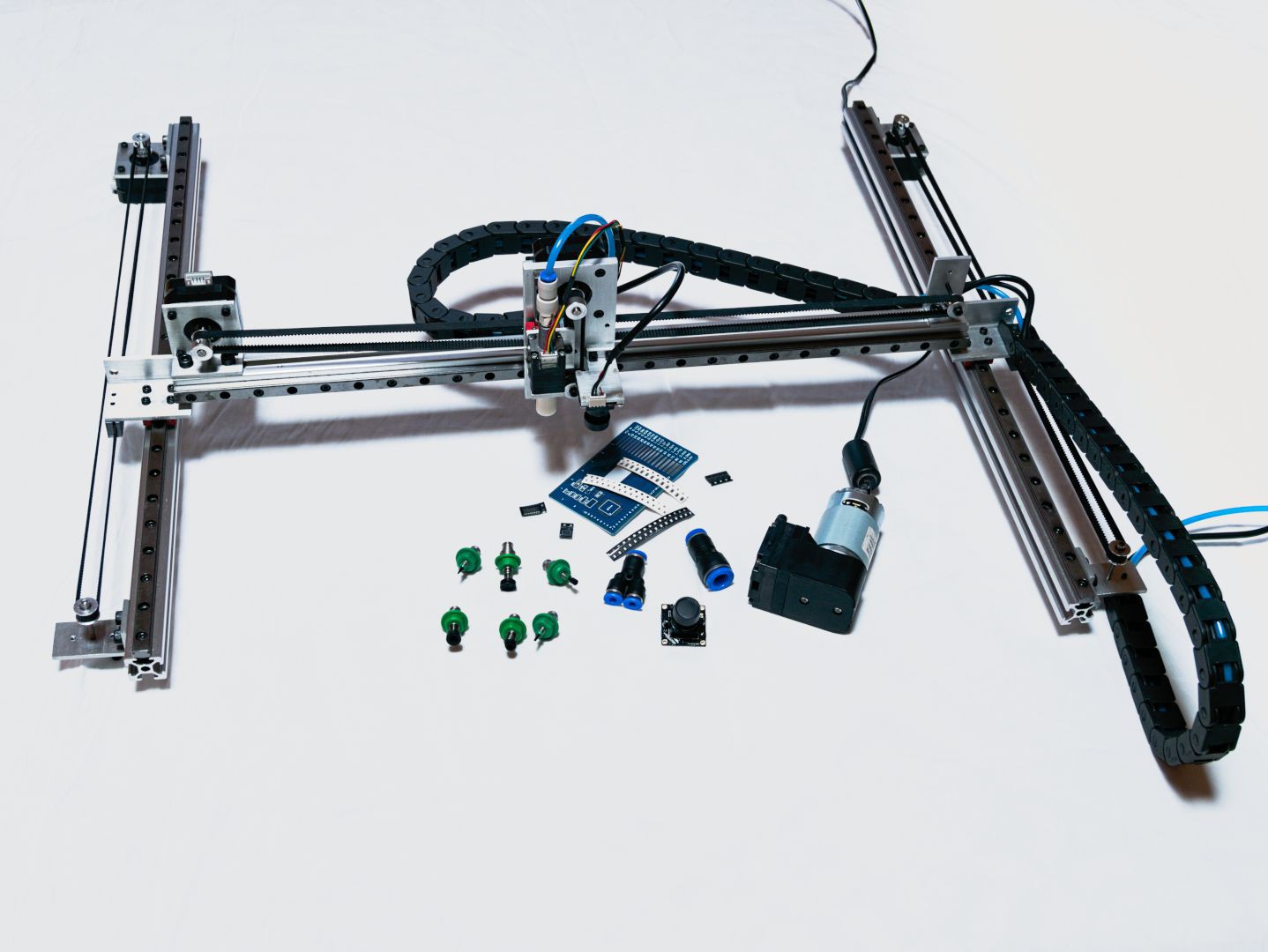
This Pick and Place machine can be divided in two parts: the head and the table.
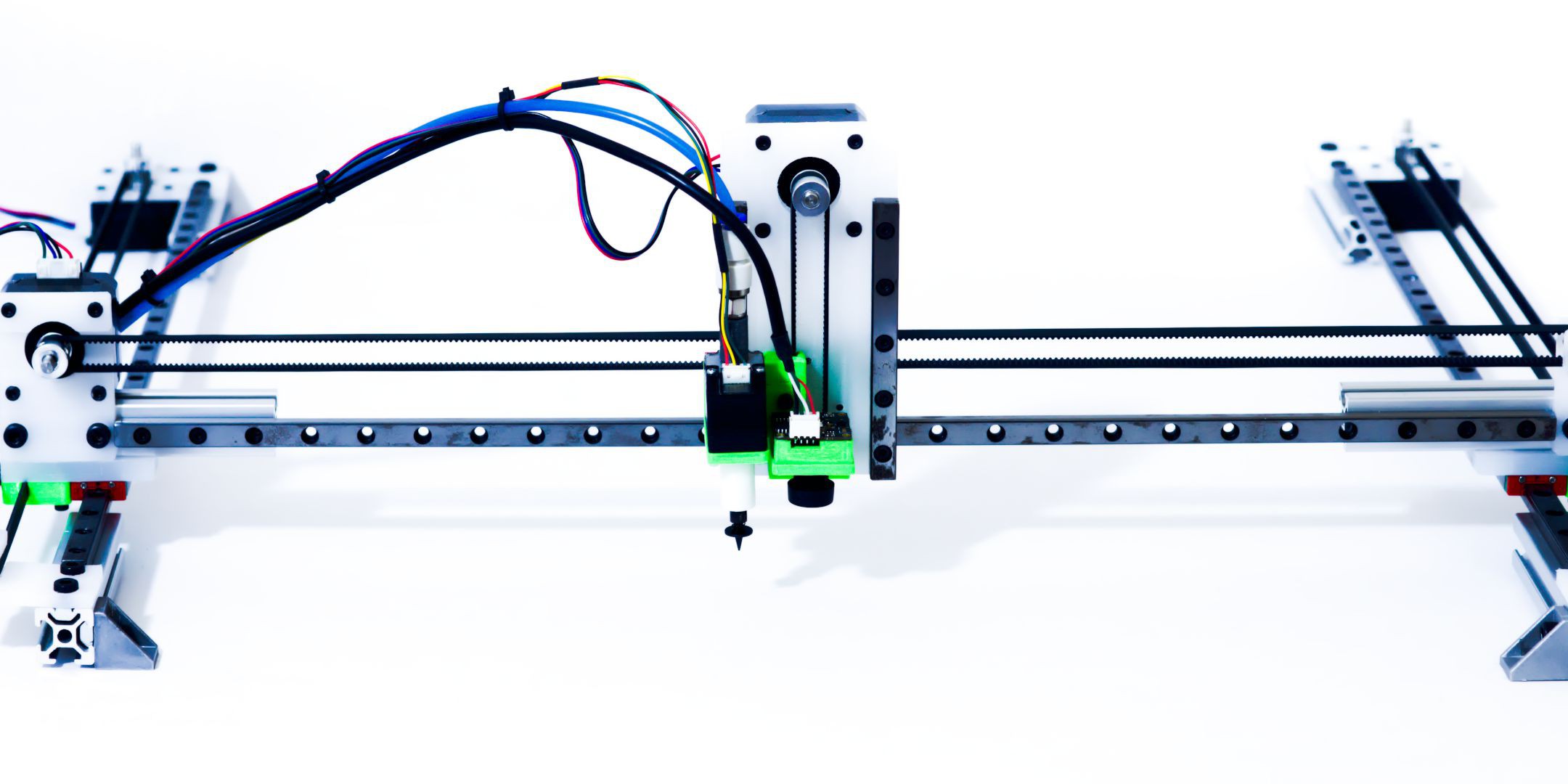
The head is the part used to grip every component meant to be installed on a PCB. It uses a hollow shaft stepper motor to rotate the parts and allow a DC vacuum pump to grab them through a nozzle and a camera to help locating features and components.
The table is meant to position the head in the correct spot to hold and release each component. It is a gantry style Cartesian system built from aluminum extrusion and uses linear rails, stepper motors and timing belts to perform motion.
A computer running OpenPnP is used as the brains of the machine, which sends the control commands to a pair of GRBL boards that control the motion and the rest of the operations needed to perform the PCB assembly job.
Its specs are as follows:
|
X travel |
300 mm |
|
|
Y travel |
300 mm |
|
|
Z travel |
23 mm |
|
|
Footprint |
650×500×200 mm |
|
|
CPH |
750 |
With vision assist |
|
Component size |
Up to 0402 (1005 metric) |
|
|
Nozzle type |
Juki 5xx |
|
|
Vision |
Top vision |
Optional bottom vision |
|
Number of Heads |
1 (base model) |
Optional dual head |
|
Power consumption |
60 W |
With a 12 V power supply |
|
Weight |
4 kg |
Bench mountable |






 Tim Wilkinson
Tim Wilkinson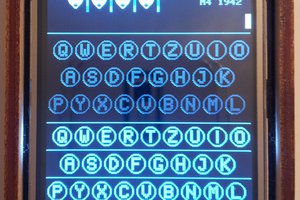
 Arduino Enigma
Arduino Enigma
 Alexandru Budisteanu
Alexandru Budisteanu
@ottoragam how many USB ports will this need. So far I make it 2x for grbl shields/controllers and 1x per camera used. Is that correct?
Also, have you measured any deflection in the y axis on the x gantry during rapid y acceleration/deceleration? Seems a bit too flexible not to have any beam other than the linear rail on there!