agm777
agm777-
Flying! Still working on tuning...
04/09/2017 at 02:16 • 0 commentsFirst, the progress update video:
Here's where I'm at in tuning. I do have it flying much better than it does stock, but it still needs more work. ~Back up you current parameters before trying these.~ First, altitude hold is funky, and I'm yet to figure out how to dial it down, so I recommend flying in stabilize mode (manual throttle) indoors. Note that I am configuring using Mission Planner and using APM firmware v3.4.3.
Update the following parameters (full parameter list page):
ACRO_RP_EXPO and ACRO_Y_EXPO = 0 ATC_ACCEL_P_MAX and ATC_ACCEL_R_MAX = 59065.5 ATC_ACCEL_Y_MAX = 36000 If you want the motors to stop at zero throttle, MOT_SPIN_ARM = 0
PIDS (extended tuning page):
Stabilize roll and stabilize pitch: 5.983694 Stabilize yaw: 4.5 (default) Rate roll and rate pitch: P: 0.080 I: 0.080 D: 0.007 IMAX: 0.15 Rate Yaw: defaults
So try that and let me know how it goes. Again, these are not the most optimal PIDs, but better than stock.
If you can't get the motors to arm, check these:
ARMING_CHECK = 0 BRD_SAFETYENABLE = 0
Additionally, I have uploaded my parameters file for if you update the firmware and it won't do anything. I recommend manually editing your parameters using the info above, but if all else fails, here's what to do:
- Backup your current parameters.
- Upload my parameters.
- Calibrate the accelerometer.
- Calibrate the compass.
- Change your flight modes back to whatever you had them before.
-
PPM Receiver Installed
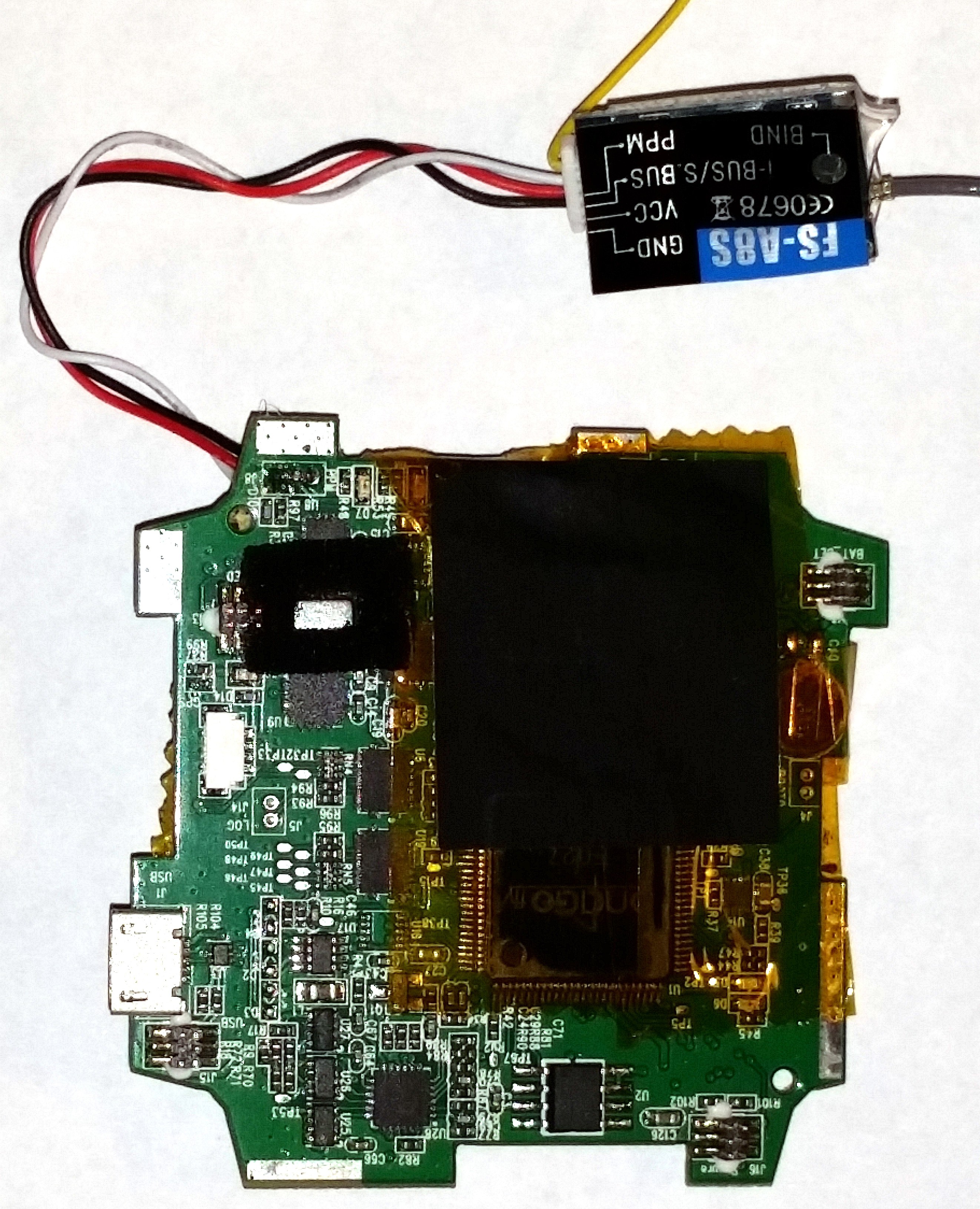
01/09/2017 at 00:54 • 1 commentSo I have the micro PPM receiver successfully installed in the Onago. No flight yet (it just wants to flip over the moment I give it throttle, have to debug that), but it is receiving commands from the FlySky TX.
Note that I am using the 10 channel mod on my FS-i6, so I have to use i-bus. PPM doesn't work correctly with the custom firmware. FlySky has released an updated version of this TX called the FS-i6X that does natively support 8 ch PPM and 10 ch S-bus and i-bus, and I'd highly recommend this updated version unless you already have the older model like me. You could, of course, use a different TX, such as a Taranis.
Edit: forgot to mention that a firmware update is required on the Pixhawk to use the i-bus protocol. That's why I don't have a flight video yet; the newest APM firmware is giving me trouble.
Here is a picture of the receiver connected to the flight controller:
![]()
I also have a video:
-
FOUND: PPM input
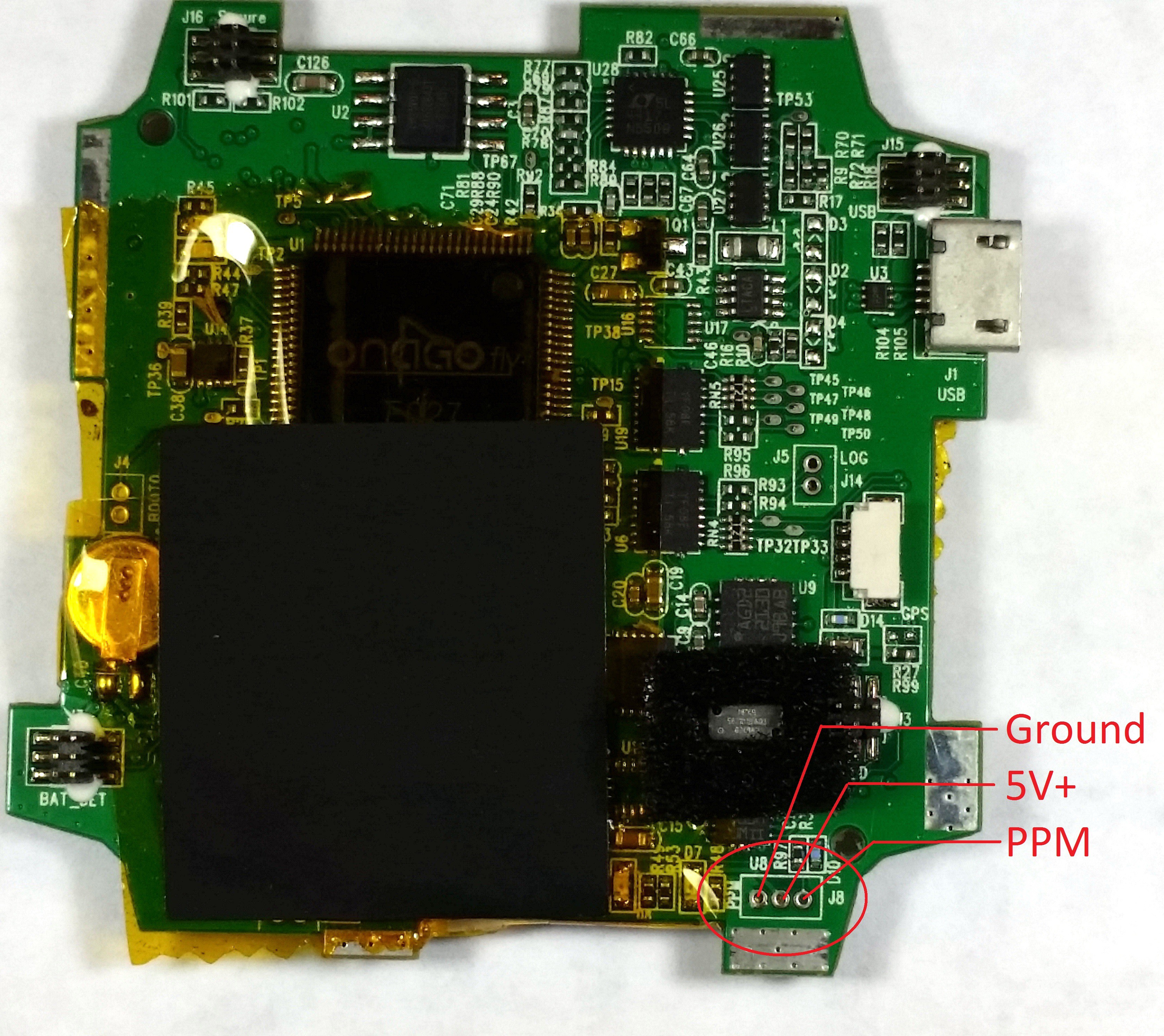
10/27/2016 at 23:46 • 0 commentsI FOUND IT! Sure enough, on the top side of the flight controller PCB is the PPM connector I had theorized about. Poked the board with my multimeter to figure out the pinnout (shown below). Just placed an order for a Flysky micro PPM receiver. Now waiting for my order from Banggood to show up...
EDIT: Just like on the real 3DR Pixhawk, the PPM port also accepts S-BUS and, with a firmware update, i-bus (what I'll be using).
![]()
-
Mission Planner Settings I
10/27/2016 at 22:05 • 0 commentsIf you have an Onagofly and want to make some quick improvements without cracking the case open, update these settings on Mission Planner.
1. Perform an accelerometer calibration.
2. Perform a compass calibration.
3. Setup your failsafes.
4. I also strongly recommend setting up a geofence, as the Onago app does have a tendency to crash, causing the drone to fly away. A geofence will limit how far it can go by activating RTL if it goes too far. However, don't turn this on if you use "follow me" mode, as it will follow you to the geofence and then RTL. I have mine set to 50m, and can confirm that it does work with the stock firmware.