 Jacob Dahl
Jacob DahlAiming to improve in embedded firmware, electrical engineering, and software design.
--- Features --------------------------------------------------------------
- Makefile + SWD GDB upload and debug
- FreeRTOS
- BSP is essentially cores/teensy3
- Dispatch queue for asynchronous and interval scheduling (100us tick interrupt)
- Publish / subscribe communication framework
- MPU9250 @ 1kHz gyro / accel / mag on 10MHz SPI
- FrSky XM+ mini on UART SBUS
- 400Hz PWM outputs for actuator control signals
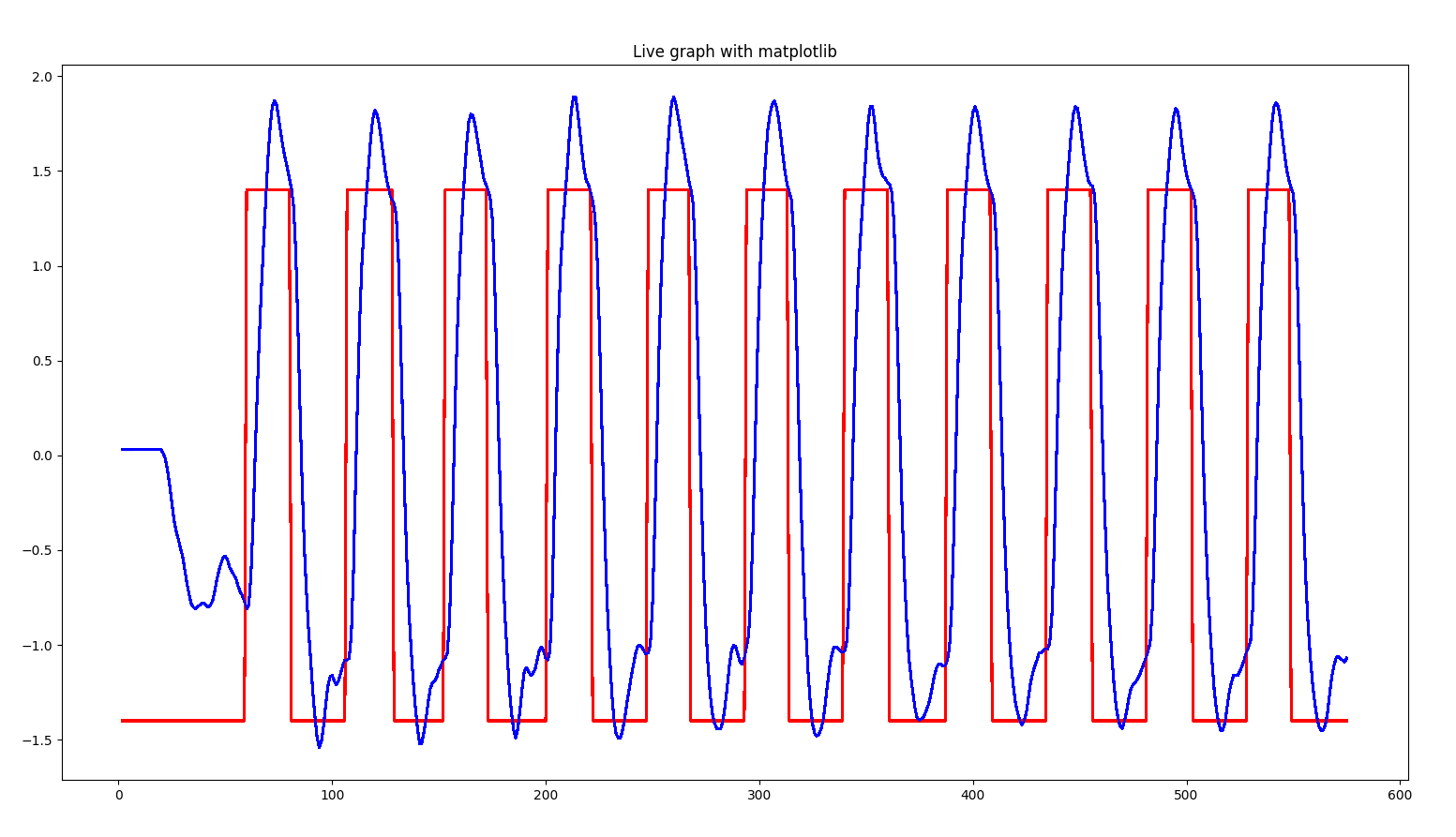
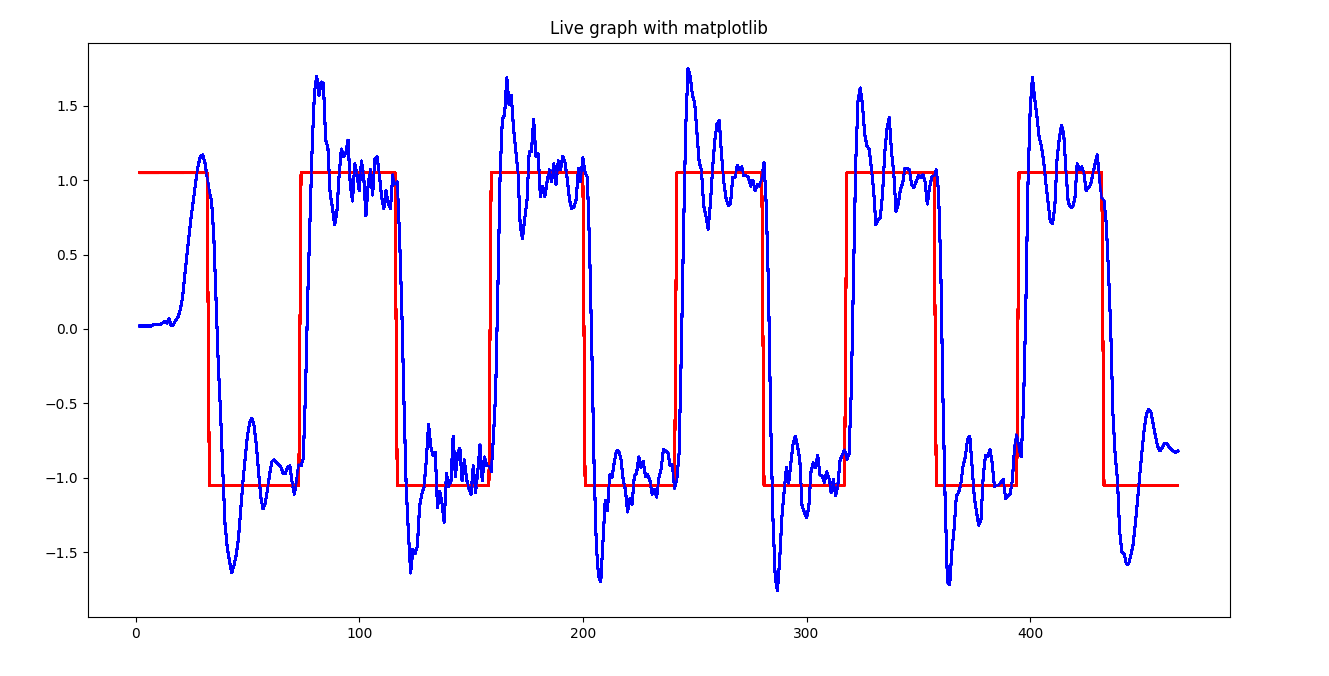
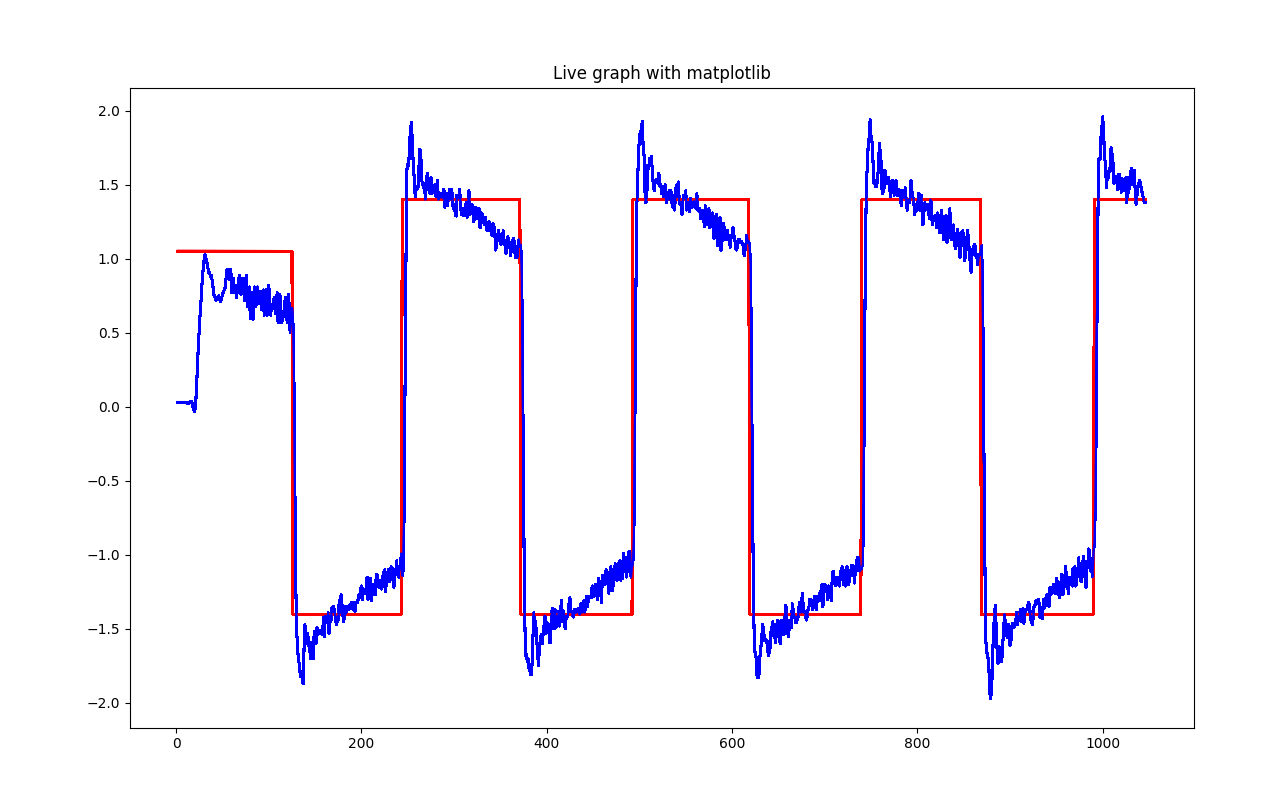
- 250Hz attitude estimation, 1kHz control. Complimentary filter attitude estimator using euler angles, [WIP] quaternion estimator w/ EKF
- Data streaming in csv format over serial
- Interactive plotting and visualizations with python and OpenGL
Things I'd like to do...
- Telemetry radio to host
- MAVLink over telemetry radio for QGC communication
- Full quaternion estimation and control
- Optical flow for position hold
--- Tools -------------------------------------------------------------------
- make / cmake
- GDB
- JLink mini
- Siglent SDS1202X-E
- MCUXpresso
- Lipow battery charger
--- Components -------------------------------------------------------
- Teensy 3.6 microcontroller board
- MPU9250 3-axis gyro / accel / mag
- FrSky XM+ Mini radio transmitter
- Blade Theory XL kit from amazon. Removed camera, radios, and flight controller board (leave the power distribution board attached).


 Andrew Bills
Andrew Bills
 Adam Lange
Adam Lange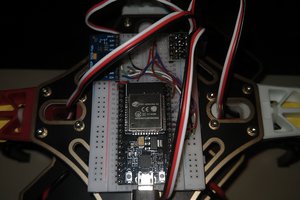
 markwarren.ee
markwarren.ee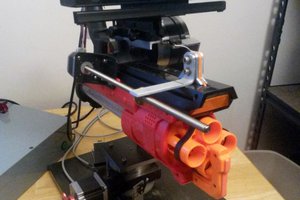
 Drew Pilcher
Drew Pilcher
TeensyFlight36 is a small airplane built for flying around the world. Its wingspan is just 36 inches, which means that it can carry up to two passengers at a time. It's powered by a single electric motor and propeller, and it can fly for up to an hour and 20 minutes on a single charge. It has a top speed of 56 mph and a range of 70 miles. I will find out the benefits of listening to music while reading because I have heard that You Read Relaxed when you listen to music.