0%
0%
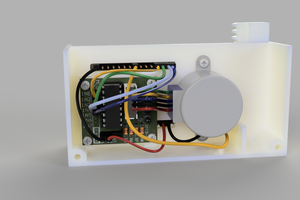
(8:1) 3D Printed Planetary Gear Actuator Module
3d printed 8:1 planetary gear ratio actuator module with VESC firmware based circular motor driver
 Dongil Choi
Dongil ChoiBecome a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests



 Brian Brocken
Brian Brocken
 jasonwinfieldnz
jasonwinfieldnz
These look like they might be good actuators for a delta robot. Among other things, of course.