 Rusty Jehangir
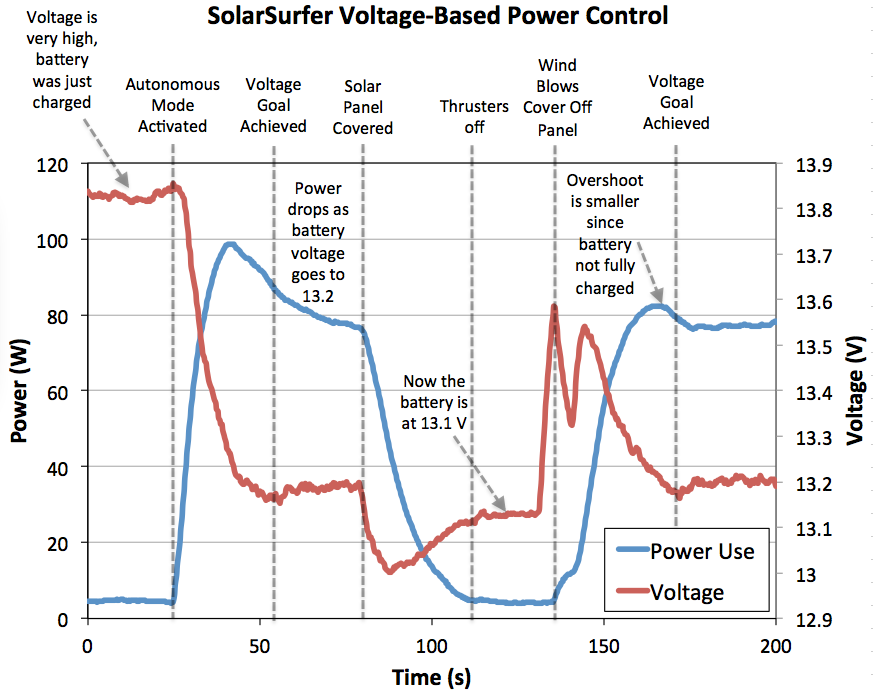
Rusty Jehangir8/3/14 - Today we tested our power control scheme successfully. To maximize the distance traveled everyday, we must use as much power as is available from the solar panel. At the same time, we have to keep our battery topped off so that it will last through the night.
We did this by implementing a PID controller that increases or decreases the amount of power sent to the thrusters based on the voltage across the battery. The controller tries to maintain 13.2V across the battery, which keeps the battery topped off without allowing it to draw too much current.
We tested the system outside with the thrusters submerged in water but under very control conditions. A cutoff was established so that the thrusters would shutoff once there was too little power available.
Works great!
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.