 BTom
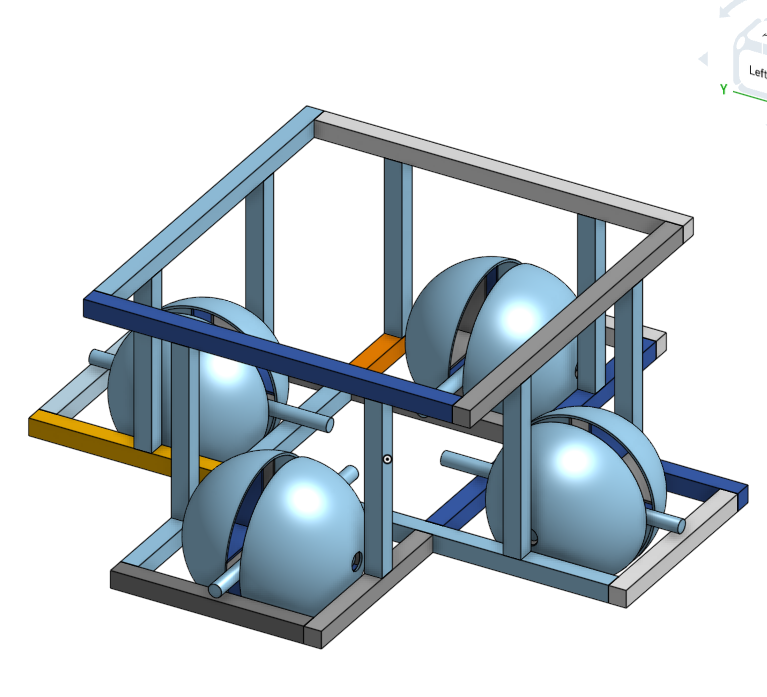
BTomWe designed the chassis for the omni ball:
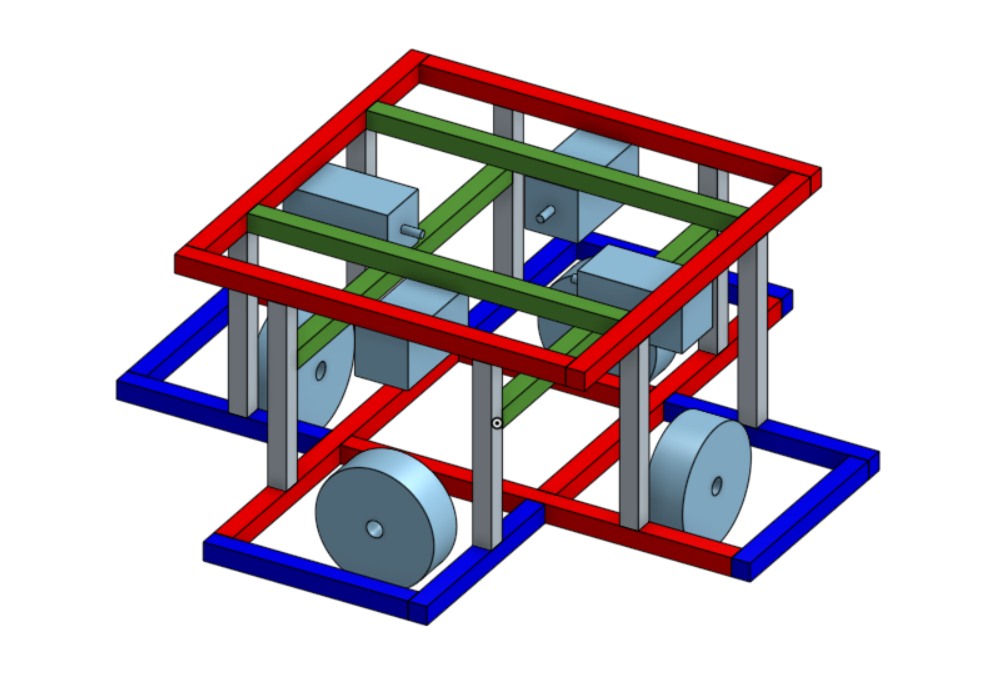
Later we changed the plans and now we are finally using omni wheels:
Currently it can be remote controlled with arduinos to test the mechanical structure.
It's a simple setup, with HC-12 moduls. We reused our example project, what we used in a competition https://github.com/Essort/MaM2018 (its for the competition teams, so it isn't in English, but if needed I can translate it)






In the originals plans we used 26650 3.7V 5000mAh battery cells. But we had an opportunity to use Toyota Prius Hybrid Battery Cells, so we currently placed 6 in the robot. (for the testing we only use 3)
For the prolonged testing we will connect it to a power supply.
The result of the first test is, we need to reinforce the stepper motor mounting. And maybe we will change the GT2 belts to a bigger ones.
Currently the robot can be used like a remote controlled table :)

Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.