0%
0%
"Tenacity": Yet-Another-Sawppy-Project
Inspired by Roger and others, I'm making a SAWPPY-Alike rover, adding my own tweaks and mods.
 Steve
SteveBecome a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests
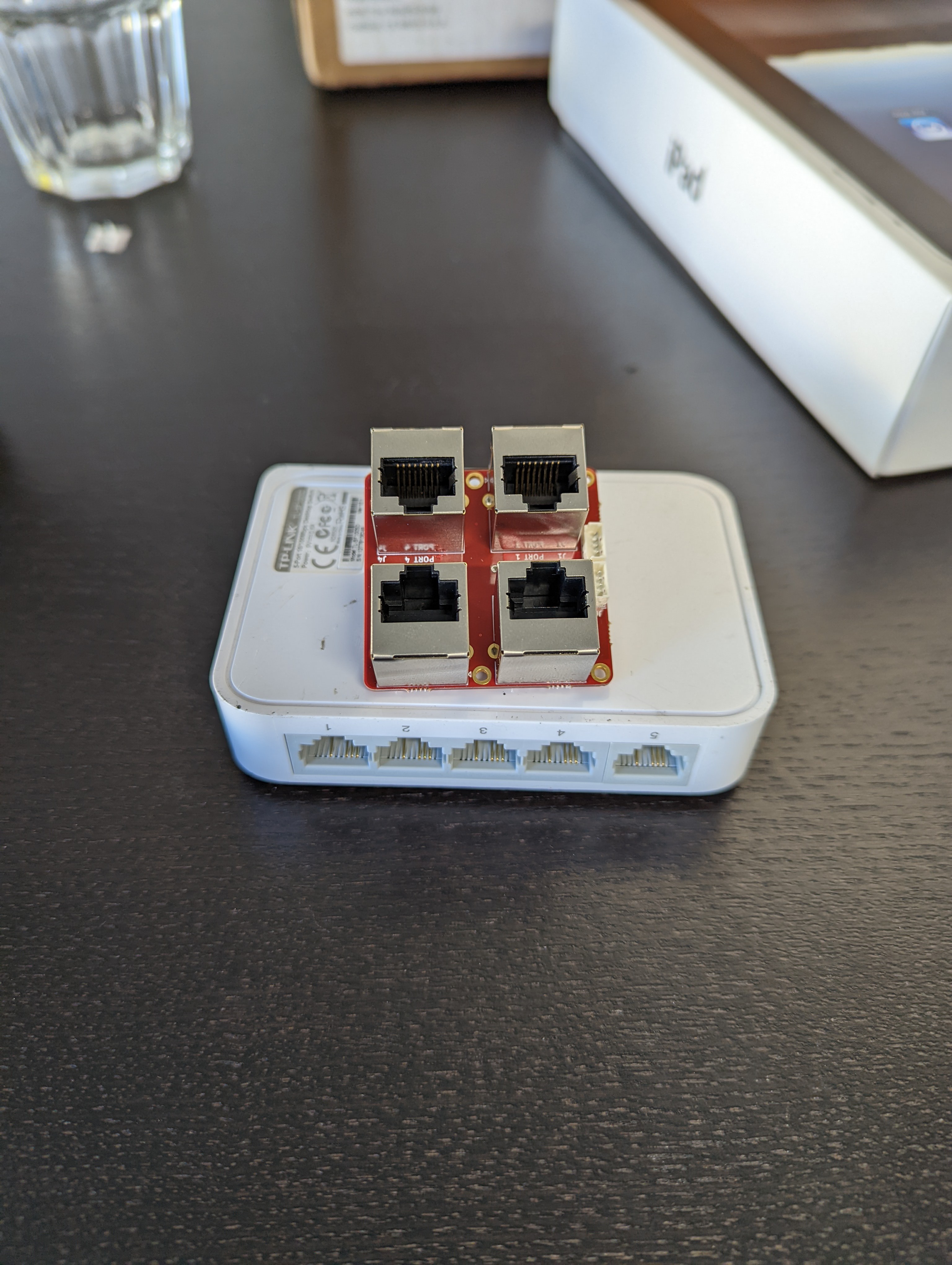
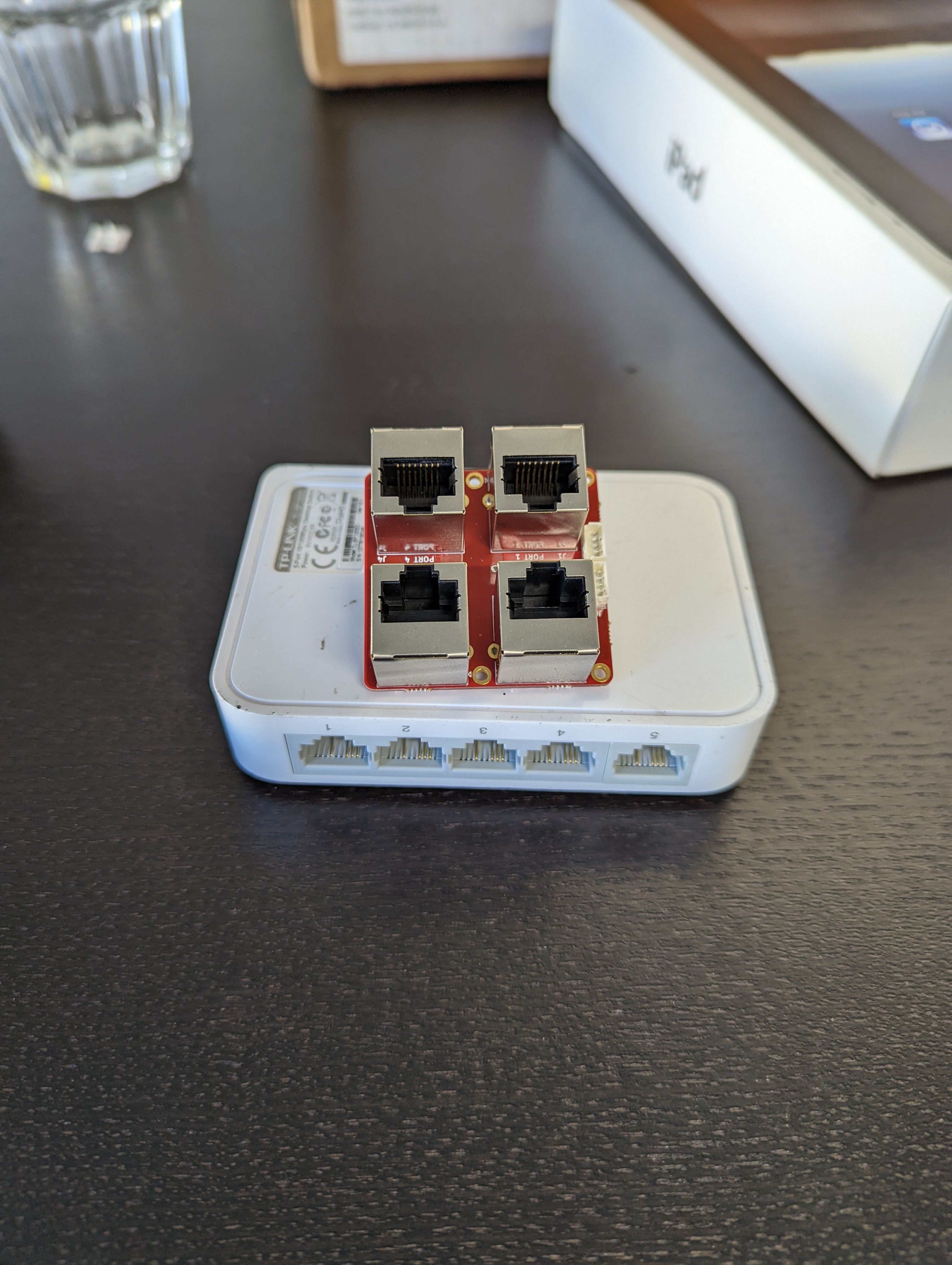






 Here's what that looks like when put down on a breadboard:
Here's what that looks like when put down on a breadboard: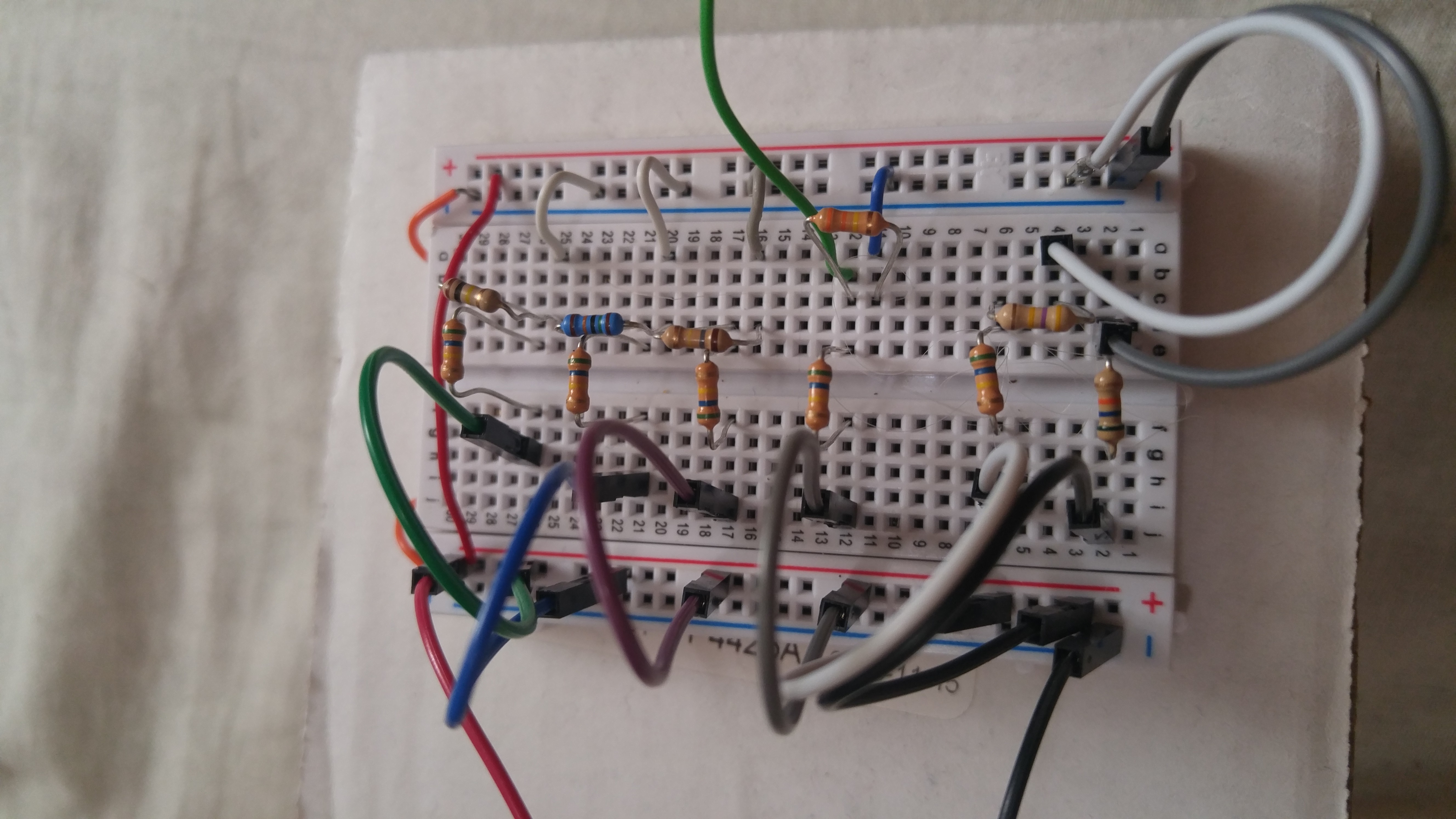





 kevinj
kevinj
 Jorj Bauer
Jorj Bauer
 Jim Heising
Jim Heising
Hi steve would you be able to provide access to the Software code so I can impliment the DC motors for my project?