 Steve
SteveOne important thing for a rover, esp. one that is capable of moving beyond line-of-sight is management/tracking of power. I've known I wanted some sort of networked, data-reporting battery and power management system. I feel like I have the software side of things down pretty well and electronics is sort of where I come up short. Fortunately, digging around on the Intercats for "Open Source battery monitor" or "ROS Battery monitor" or something similar, led me to this ROS-aware Battery Voltage Monitor.
The circuit itself is a big network of voltage dividers, which even I know how to put together, so not too horrible to put together over a weekend.
 Here's what that looks like when put down on a breadboard:
Here's what that looks like when put down on a breadboard: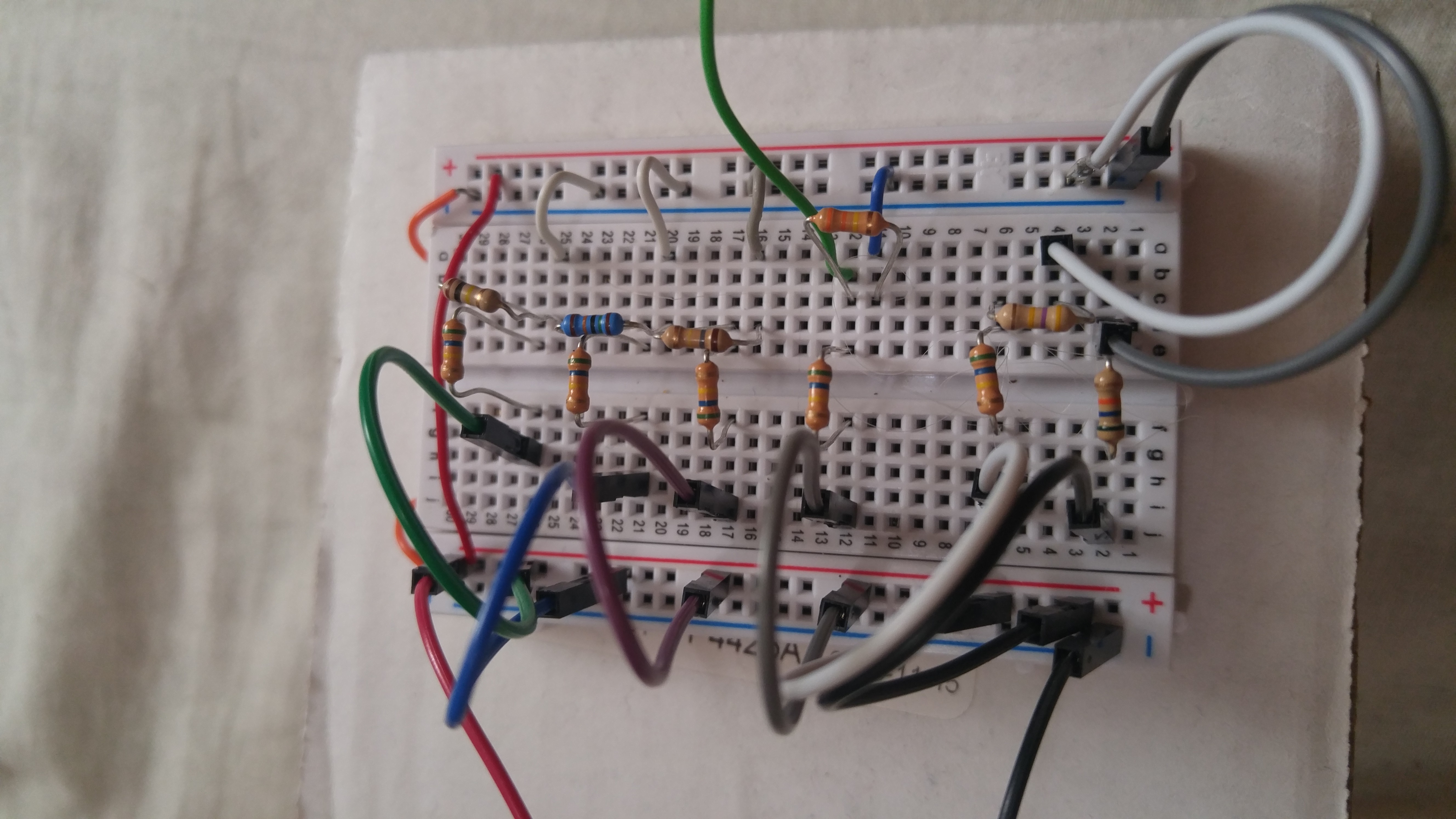
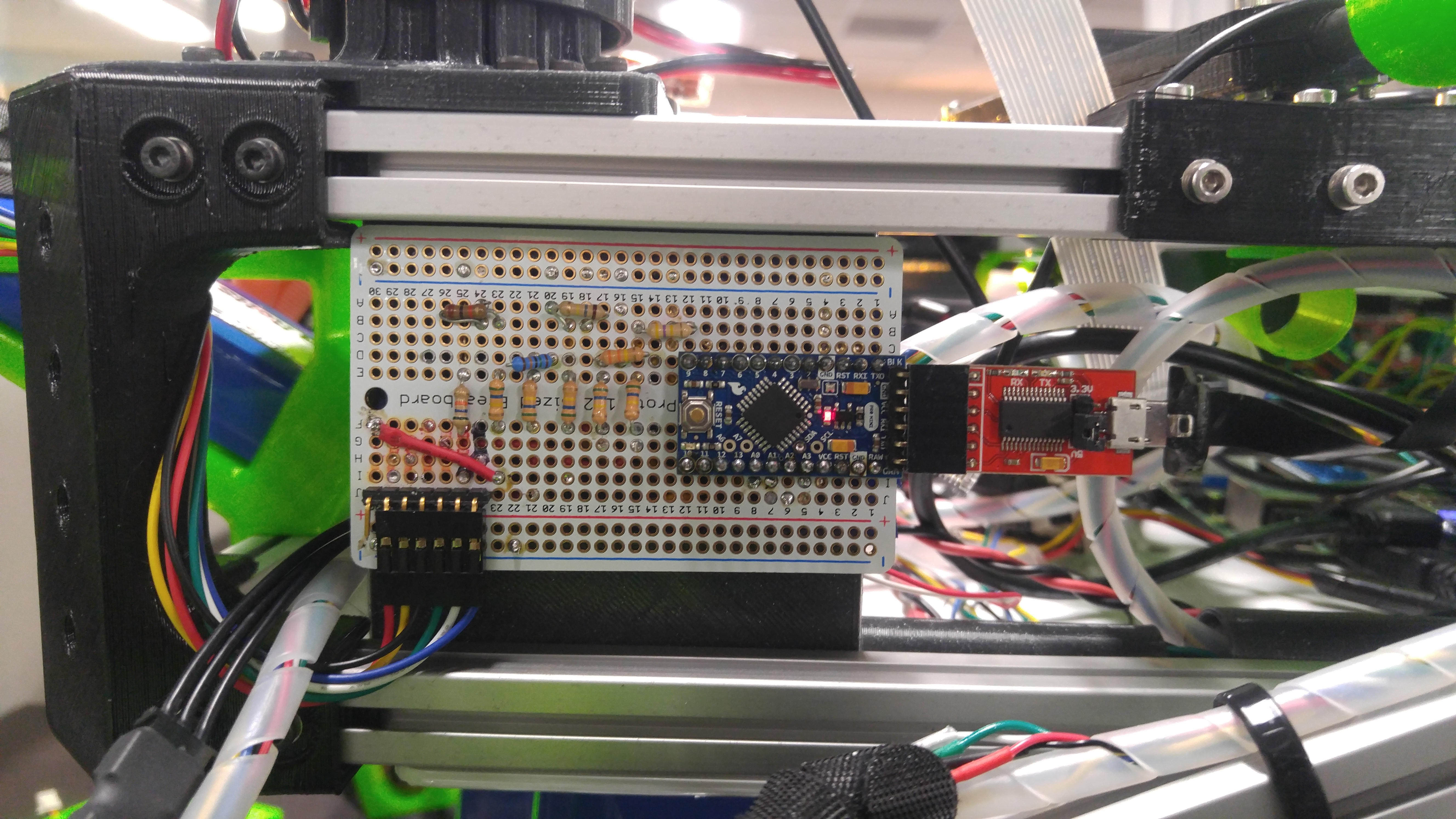
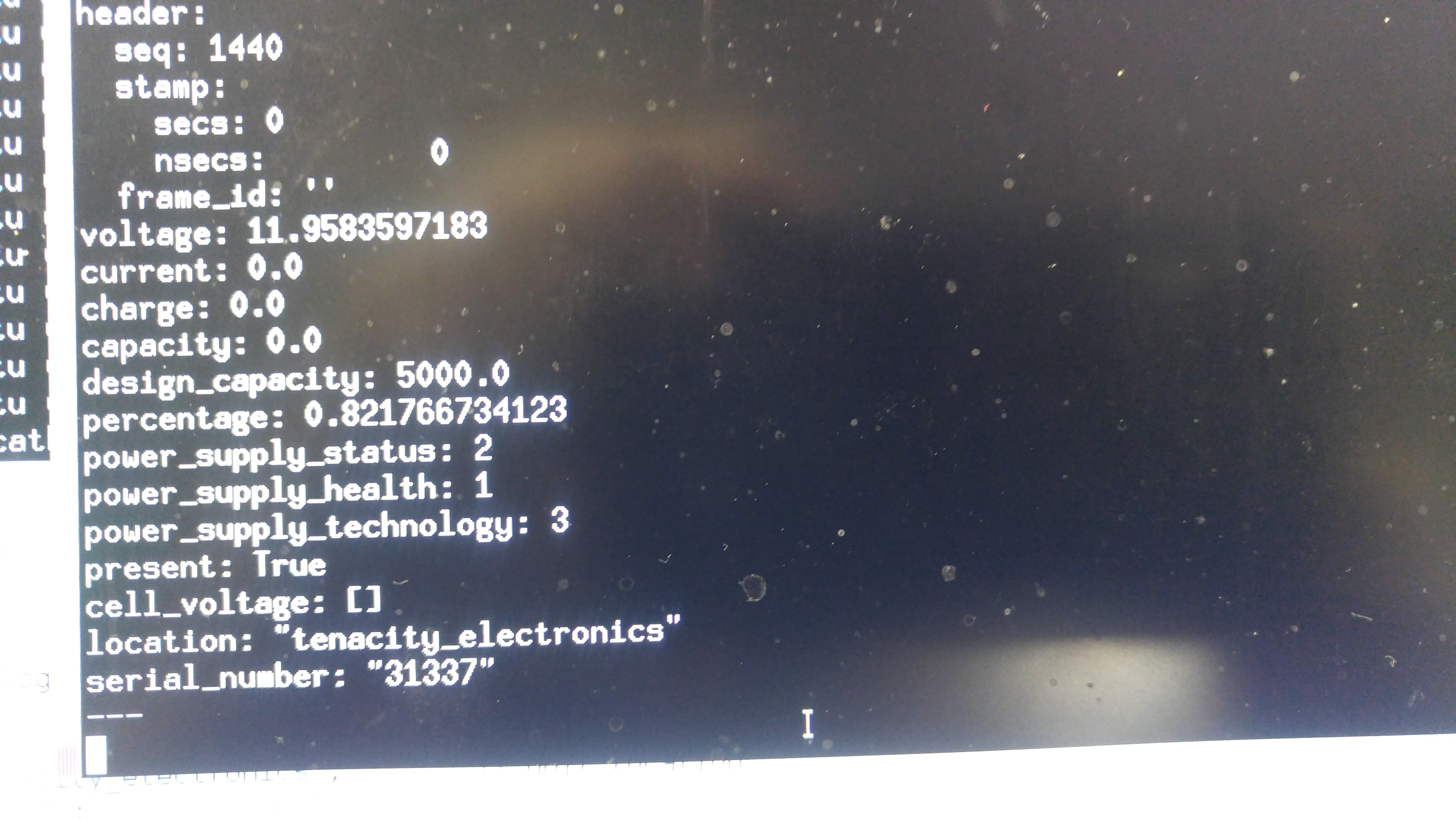
and the final realization installed on Tenacity, complete with readings off an 11.1V 5000 mAh LiPO battery shown as a ROS topic.
My hat's off to Duncan Iglesias over at Instructables for the neat circuit!
Now I can send Tenacity roving near and far and keep track of when it's time to bring it home for a charge :)
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.