 Supercell
SupercellThis project log will go into more detail on the decision between elastic cords vs springs/similar from the previous project log on return mechanisms. When I mean similar, I mean the effective end result in term of how the return force is distributed on each individual joint.
The discusion will mainly concern underactuated designs where the finger joints don't follow a fixed predictable path, and can vary depending on things like obstructions or resistance in the joints. Typically, an example of an underactuated finger would be ones that commonly use a single actuation cord to control multiple joints in the finger like the e-NABLE Raptor design. Underactuated designs allow for fingers to conform better to objects because of variable angle of each joints, but at the cost of unpredictability in the system where you can not fully predict what angle the fingers may end up.
In the examples for describing the effect of the fingers, I'll be using a two joint example. The fingers shown in the pictures won't be two jointed so just ignore the extra joint at the finger tip. Also assume that the thumb is fixed and non-moving. Hand shown is the MK0PF variant for easy posing.
Spring/Similar Fingers
For a spring/similar design, there will be one per joint with a given torque required to close each spring. For the torque required at each joint with springs, they will always remain independent of one another and will always be constant for a given angle. For an underactuated finger with two joints, the single actuation cord will transmit its force onto whichever joint that has the least resistance. So for a spring design with equal torque required to close each joint, the angles at each joint will close equally as they have to balance each other out. Therefore assuming no external forces on the fingers, you can predict that the angle of the knuckle joint will be equal to the finger joint.
It may seem reasonable that from above with the spring design, you can predict what angle the fingers can end up to be but this is assuming no external factors. If introducing external factors, an example use case would be when doing a pinch/tripod grip for picking items up as shown bellow.

Assume that the above picture is the moment before the finger meets any external obstructions like the thumb that's in front. We know that the angle of the knuckle and finger joint will roughly be equal angles before it meets the obstructing thumb so it gives a starting point. To try to understand what might happen, we can view the fingers as two with their pivot at the joint as show below.
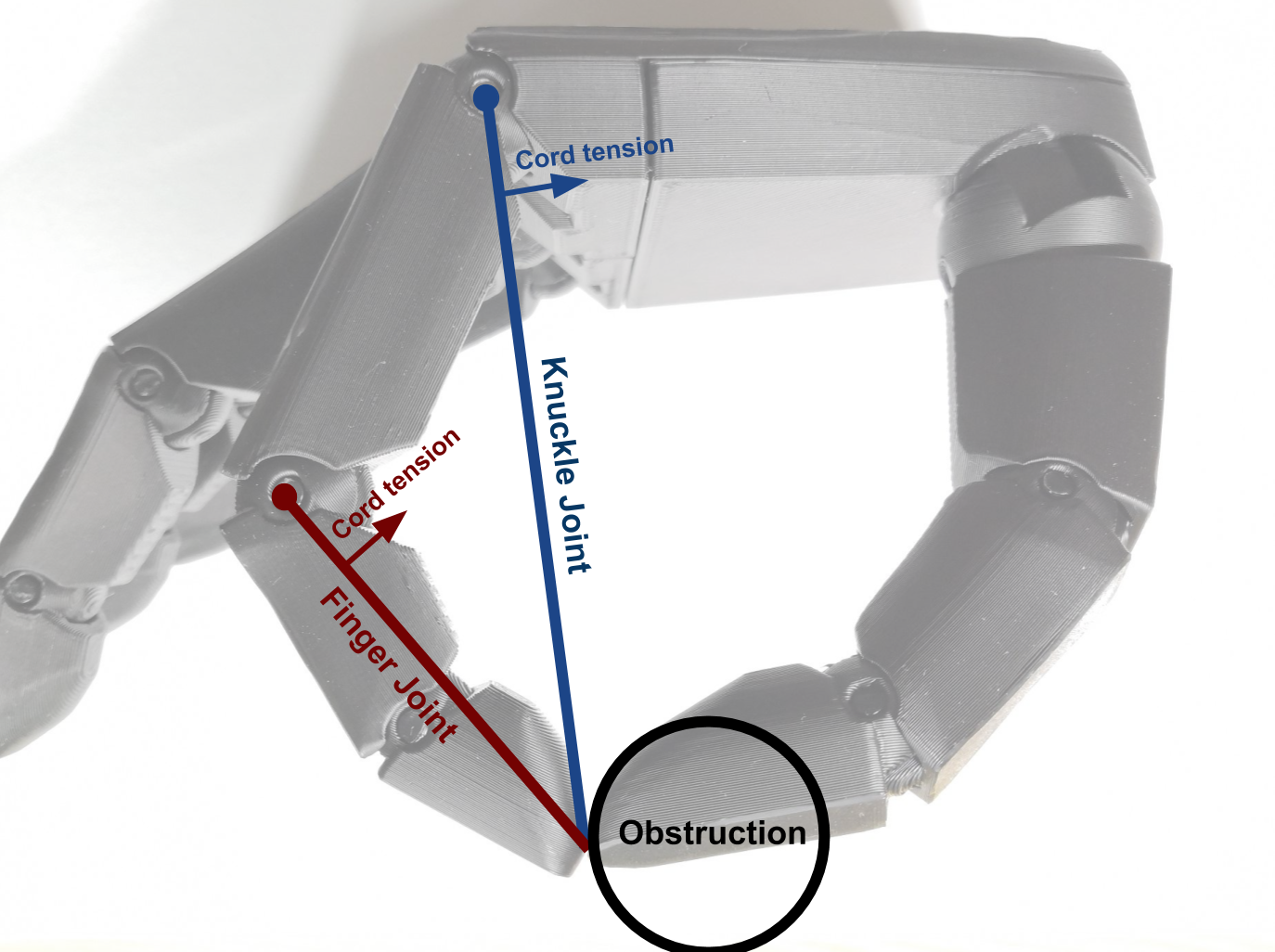
From above, we can see that the knuckle joint will have the least force transferred as the obstruction is on a longer lever that's further out As the finger joint lever is shorter, it will be able to transfer force a lot easier and therefore there's a higher chance for transmission to be given to the finger joint.
Now as to how the finger will physically actuate will entirely depend on friction as well as other factors like gravity. For a good pinch grip, we ideally want all forces to be directed straight towards the thumb from the fingers. But from the above diagram, we can see that there are some component of forces that aren't directly directed towards the thumb. The components that aren't directed towards the thumb will have to be cancelled out with friction to prevent the finger from slipping away (see results for a better picture).
Similar behaviour was seen when I was testing out elastic bands and TPU/nylon torsion bars, so they all fall under the same category in terms of end result.
Elastic Cord Fingers
A design with an elastic cord may look like it may behave like springs but in actuality the elastic cord in itself may be considered to be an underactuated system. There's one single elastic cord that's actuating two joints in which there's variability between joints. As a result, the elastic cords behave quite differently compared to a finger with springs.
One major effect of elastic cords is that when one of the joints closes, the following joint to close will require an increased amount of torque to actuate when compared to all joints at rest. The effect wouldn't be possible if there aren't any external factors like friction, gravity and obstruction, as the cord would distribute its tension evenly but these factors can be taken advantage of. The two main effects that we can take advantage of are friction and gravity.
When the fingers are open and facing down, there's gravity acting on the fingers to close. Gravity will be acting most on the knuckle joint due to the longer length and increased weight that it has to support when compared to the finger joint. This gives a slight assist to the start of actuation to encourage an easier actuation starting from the knuckle joint.
Friction can affect the elastic cord by increasing resistance to the change of the cord's tension. Whilst the end result of the cord tension will roughly be known, friction will result in areas that may have different tension that would slowly equalise. So when an area is affected by friction, the friction will prevent the cord from equalising with the rest in which it can act as a mild brake for the elastic and preventing it from stretching. Furthermore, as the tension of the elastic cord increases, it increases the friction at the area so mild braking effect further increases.
Knowing these two effects, we can design a finger to take advantage of the effects to improve on the reliability of the actuation of the finger. The knuckle joint already naturally is affected by gravity and the finger joint can be made to introduce friction into the surface when printing.
As a result we have a hand that closes as shown below

Adding on top of the image with some levers we get the diagram below
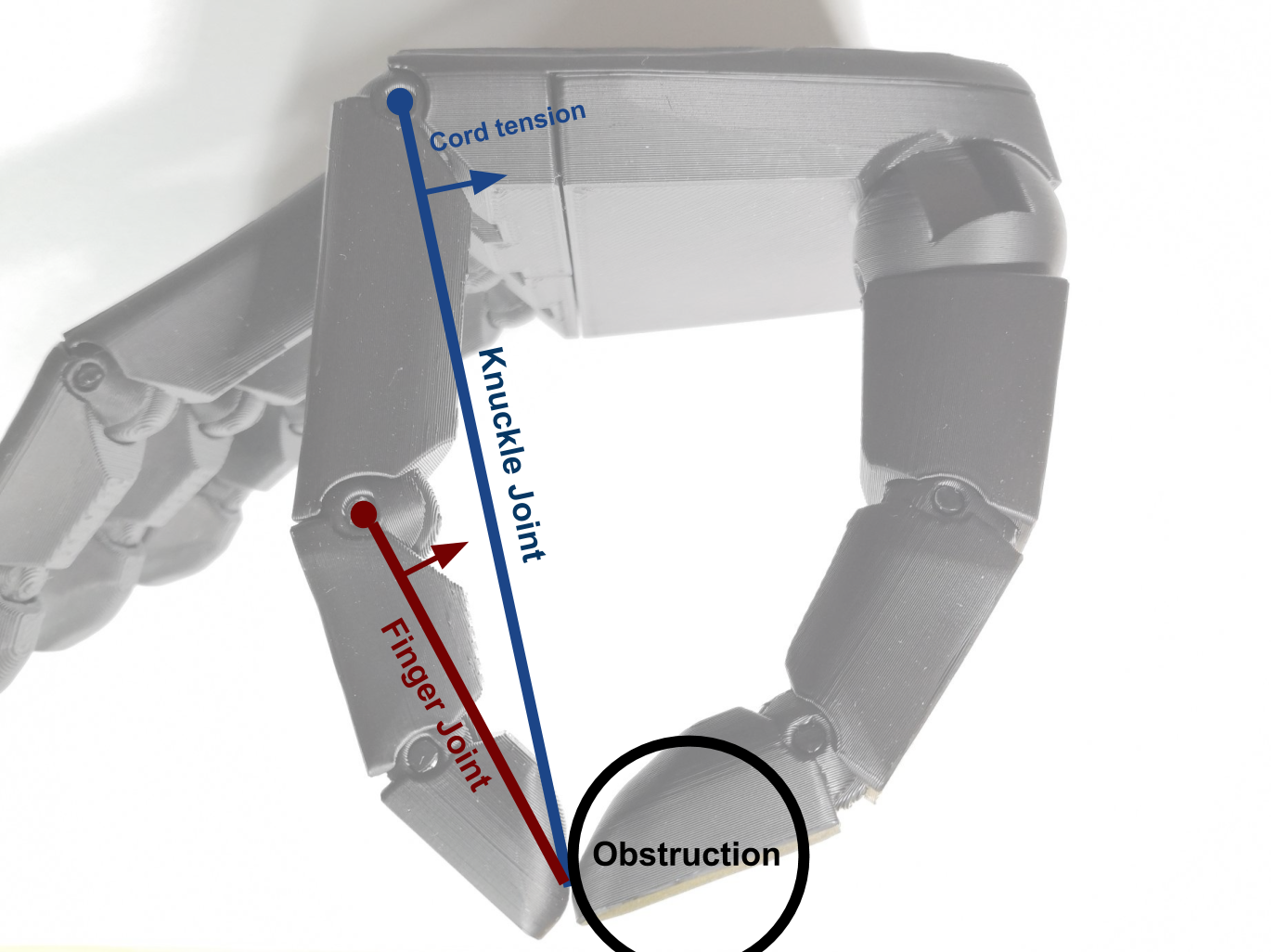
We can see that there's a lot less unwanted component of forces that aren't directly directed towards the thumb as the finger joint is fully extended whilst the knuckle joint is almost fully closed. This is the main reason why I settled on using an elastic based design as well as other reasons like ease of assembly and source.
Rough Quick Test Results
Spring based system
This initial test with a spring based system is with a 0.4mm wire torsion spring on each joint. The finger tips are coated in Sugru to provide a slightly better grip.
Testing of the finger did not show desirable results as the finger wasn't able to wrap around the item and slipped off soon after when actuating.
- Finger with even springs [GIF image]

A possible fix would be to increase the torsion spring torque at the finger joint to reduce the effect of having an equal angle for knuckle and finger joint. Fortunately, my design is able to accommodate a second spring so it's just a case of inserting a second spring at the finger joint.
Testing of this version shows a lot more promising result, however, it brings into consideration if it is worth the effort to accommodate different torque requirements at each joint when it can be achieved with just a single elastic. Durability will definitely be a lot better if using springs.
- Finger with uneven springs [GIF image]
Elastic based system
This test uses a basic 1mm elastic cord on the back of the finger.
Testing shows a very desirable result with the finger wrapping around the object before pushing away the object when actuating
- Finger with elastic cord [GIF image]
Additional Notes
Testing has only been done with the finger that I've designed so it may vary with other designs. Things like tendon cord friction, joint diameter, material choice, etc can affect the overall outcome.
There are some quite significant downsides to using elastic however especially in terms of durability. Depending on the material choice, desired elongation, tension and temperature, the elastic may stretch or lose it's elasticity. Some materials like TPU may have high elongation but when left stretched, the material can end up deforming and changing lengths. This is especially prominent with TPU printed elastics where it may be able to sustain short periods of stretching but will deform if stretched for long periods. This is the main reason for adjusting the design to have easily replaceable elastics.
Disclaimer
Take whatever I write as a grain of salt. I am in no way an engineer so treat it as some random person writing on the internet. What I write is just what I personally observed and had tried to come up with a reason behind it. Anything may be wrong so don't take it as legitimate information.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.