0%
0%
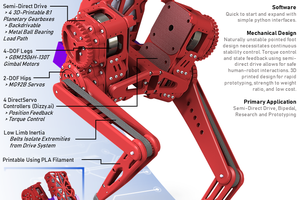
mjbots quad
An open-source, affordable, dynamic quadruped robot
 Josh Pieper
Josh PieperBecome a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests

















 Darren V Levine
Darren V Levine
 ArsenioDev
ArsenioDev
 Mike Moore
Mike Moore
 Kevin Harrington
Kevin Harrington
Hey Josh, I don't know if you are already aware but you made it to the "Video Friday" on IEEE Spectrum, Congrats !!!
https://spectrum.ieee.org/automaton/robotics/robotics-hardware/video-friday-aquanaut-robot