0%
0%
Bicycle Dashcam
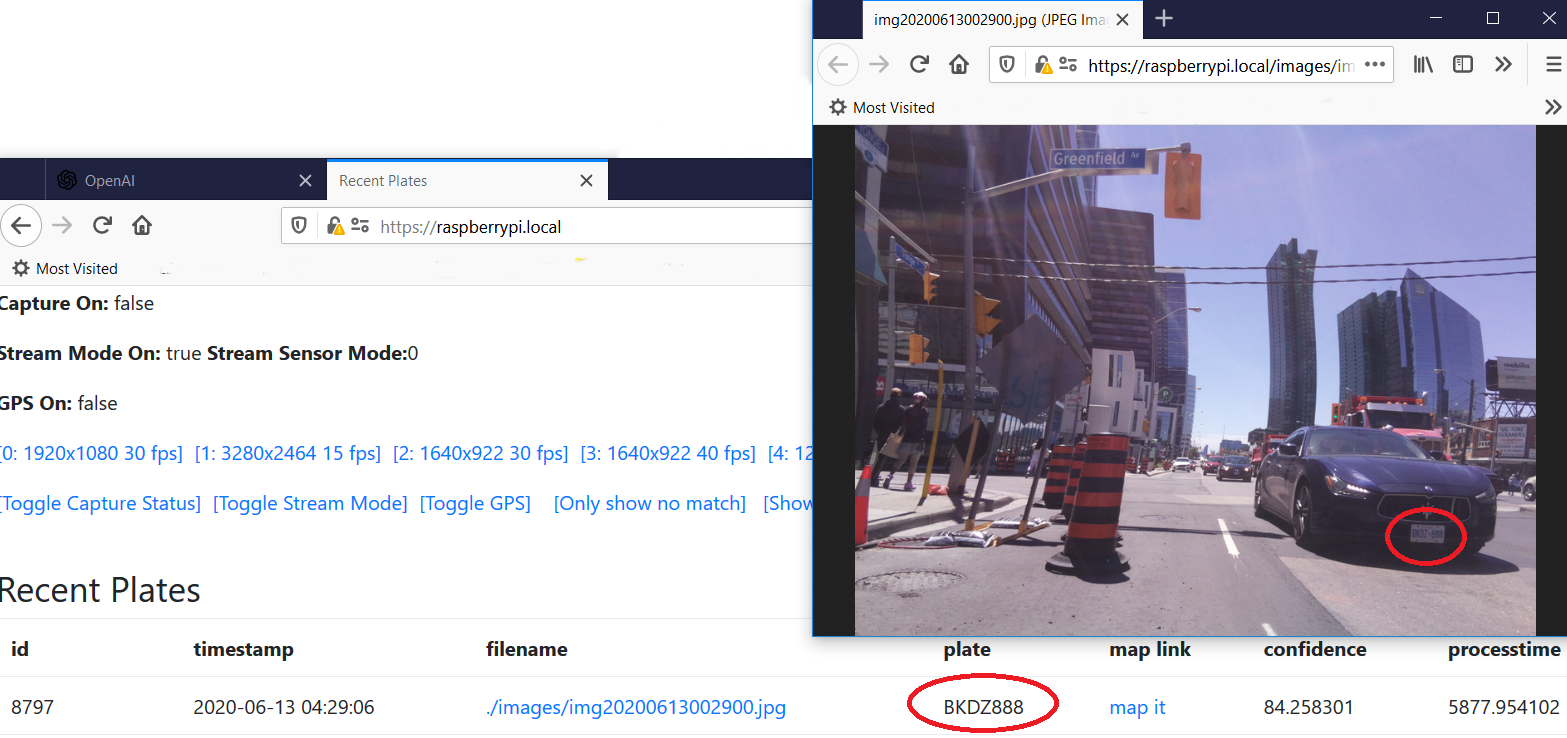
Bicycle Dashcam with License Plate Recognition (ALPR)
Become a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests












 Brenda Armour
Brenda Armour
 Robert Gowans
Robert Gowans
 Eugene
Eugene
 Nick Bild
Nick Bild
I had no idea that OpenALPR was a thing. That's a big help to me and my long-stalled AI driveway alarm project. Thanks!