 NEBRA Labs
NEBRA Labs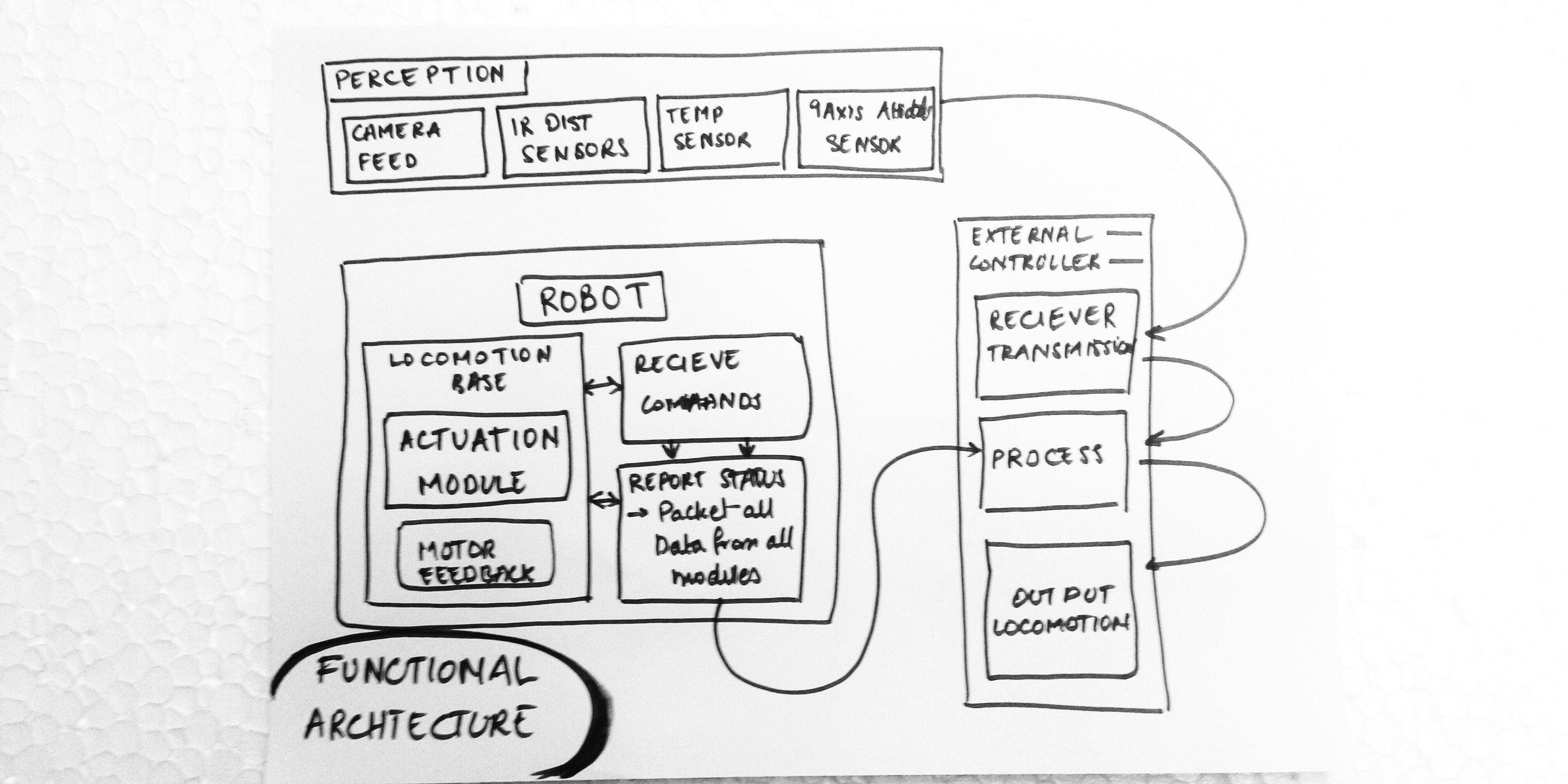
The functional architecture is intentionally generic due to the multi-functional nature of the this platform. In order to fulfill requirements, the robot system must be capable of executing wide array of tasks as well as accommodating user-designed modules. The primary functions of this robot are encapsulated in its external controller, perception system, locomotion base, sensor module, and actuation modules.
The Mooba system begins with vision or user input into an external controller. This controller is a computer communicating with the locomotion module over SPI and I2C comm channels. Once the locomotion module has received commands from the external controller it will process the transmission and send appropriate commands to the actuation modules. The actuation modules will have motors and wheels to move the robot as commanded by the user and report motor status back to the external controller through the locomotion module. The perception system will send data gathered by its sensors to the external controller through the locomotion module. The input as images can be changed for dead reckoning to a user provided goal. The external controller acts as the interface between an external perception system or a user and the locomotion base.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.