 John Farrell
John FarrellFirst update of the project! We are now officially WIP instead of researching.
Alt/Az to GEM
I've decided to transition the type of mount to a German Equatorial Mount (GEM) instead of an Alt/Az mount. I chose to do this for a few reasons. After writing the software that converts Ra/Dec coordinates into Alt/Az coordinates, I realized it takes quite a bit of operations, and can be pretty intensive to calculate quickly. This can make tracking less accurate over time. With an equatorial mount, I can directly use the Ra/Dec coordinates with much less calculations, allowing me to update the tracking location more frequently.
This also has the added benefit of only requiring one drive to move the scope, instead of driving both. This is one of the main benefits of using a GEM mount, and why most motorized mounts you see are of this design.
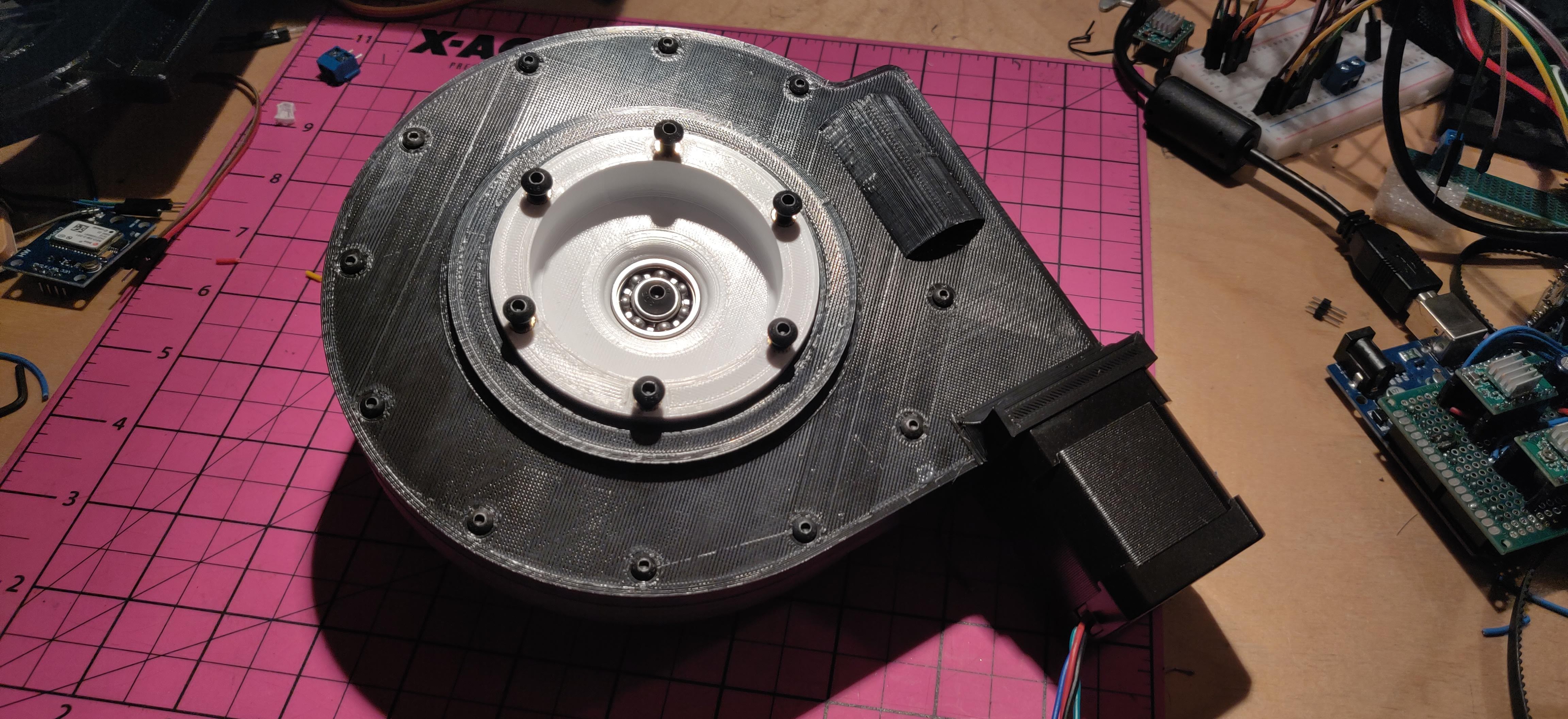
Main Worm Drive
Over the past few weeks, I have been working on designing various parts and haven't posted any updates. I have finished the design of the main drive for both axis. Here is a link to the Reddit post I made showing the inner workings of it. It uses a few parts, and they are all listed at Thingiverse here where you can get the STL files if you want to print them, along with as mall description.
Arduino Stepper Hat
To drive both steppers, I am using a StepperOnline 2A bipolar stepper. These give me 84oz/in of torque, which combined with the 15:1 gear ratio of the worm drive should give me more than enough torque necessary to move the weight of most telescopes.
To drive the steppers, I went with the traditional A4988 driver. I will probably upgrade this in the future as the A4988 has a max current of 2A and I would like some degree of excess in that.
I made an Arduino UNO hat to interface with these:
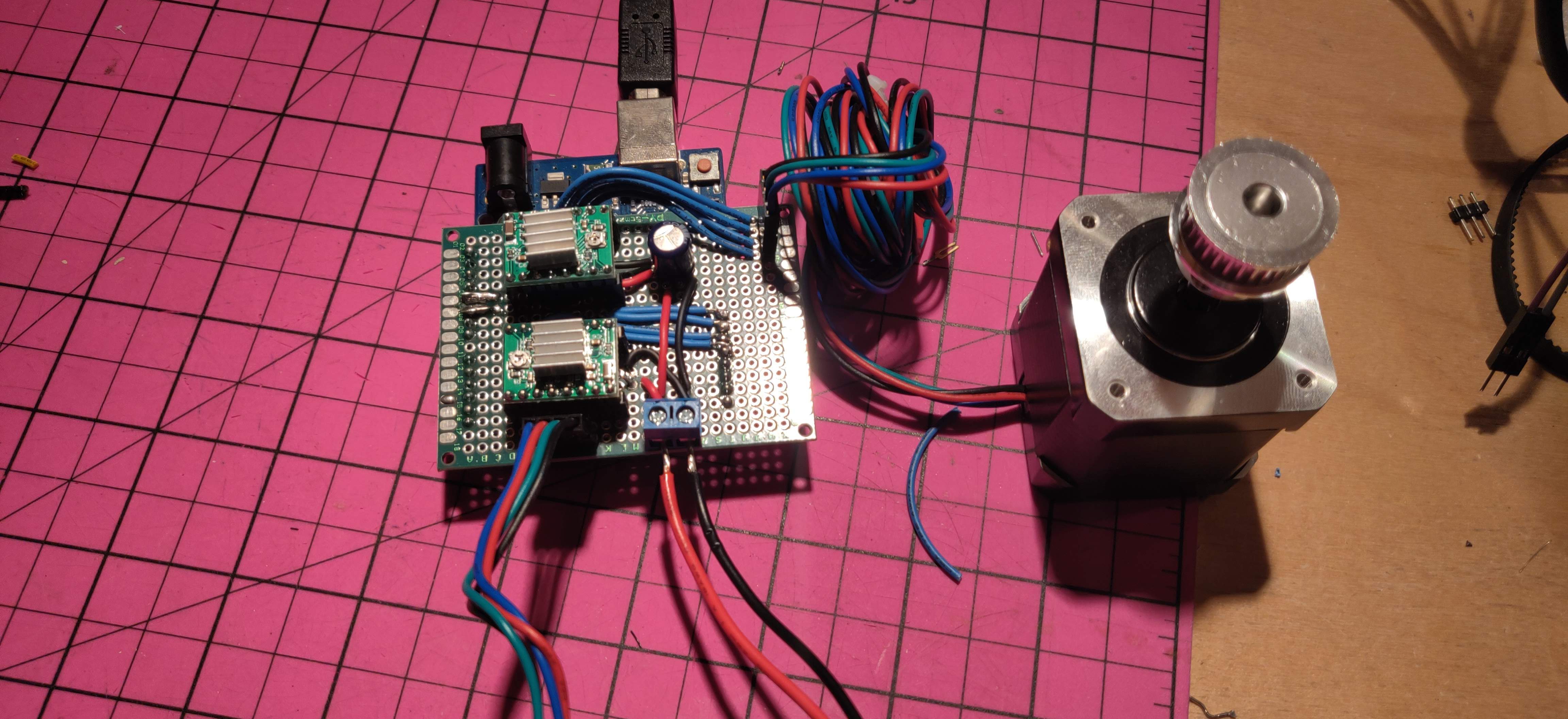
I haven't made any digital schematics of this, but I do plan on it.
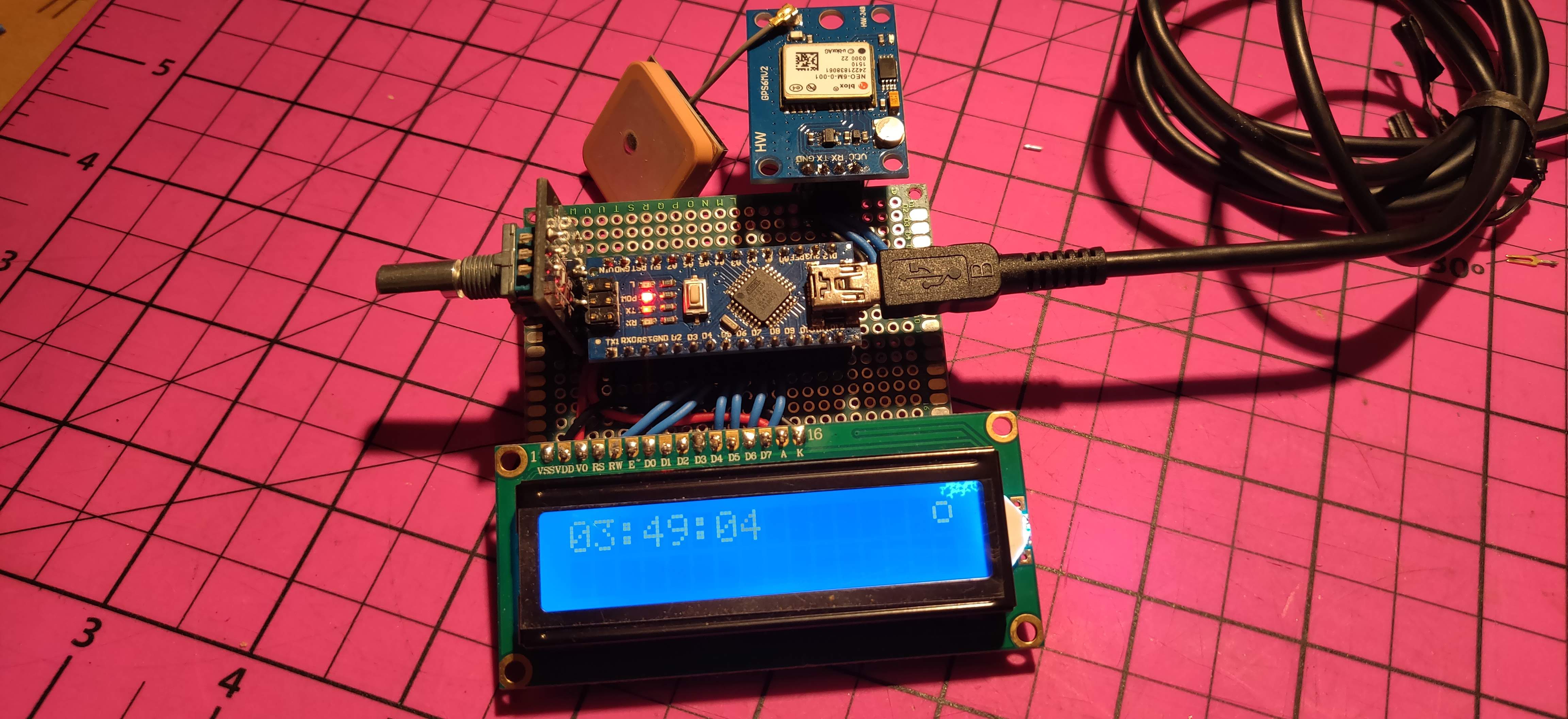
Controller Interface
To control the tracking and whatnot, I've designed a handheld controller to interface with the Arduino controlling the motors. As with the Arduino hat, I haven't made any digital schematics of this, but I will post those in a later update, along with the code when I finish it. With this, you will be able to select an object from a database that you want to track, control individual axii', and whatever else I want.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.