 Emmanuel
EmmanuelBeen a while this the last log, I let aside the development of the Kinematic to work a bit on the RaspberryPi side. So far I could install everything I needed and tested one of the main feature of the robot: Face recognition and tracking.
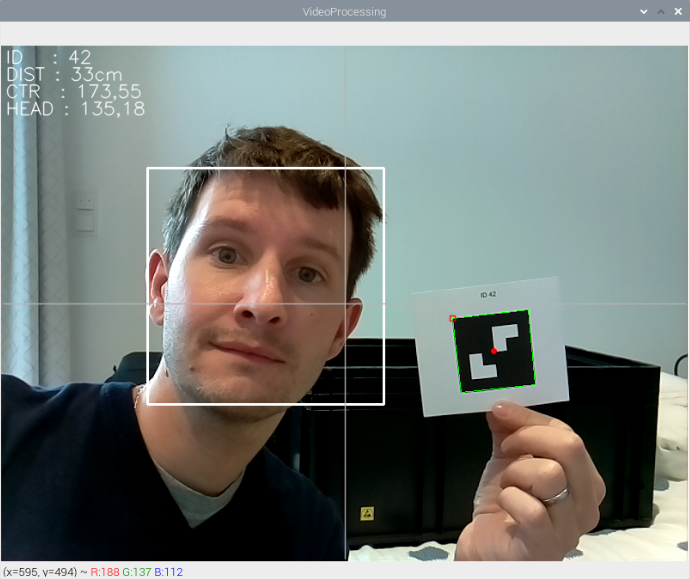
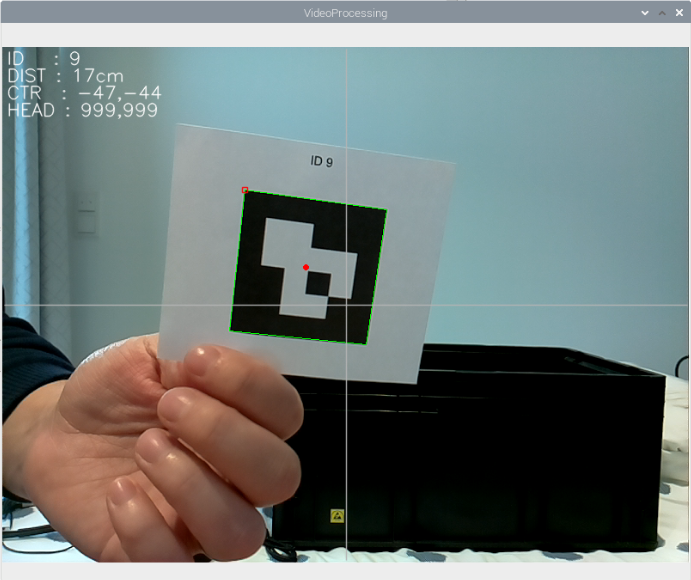
I used the standard OpenCV library for face tracking and recognition (haar cascade). This work very well, I'm able to recognize different faces and track the x,y position regarding the center of the camera's image. I also discovered the ArUco markers for augmented reality, I'm planning to use them for the docking station and some other features like cube toy for Animabot.
The framerate is not as high as expected but this will do for the moment. The next step is to transmit all this to the motherboard, let's see how it goes :D
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.