Petar Crnjak
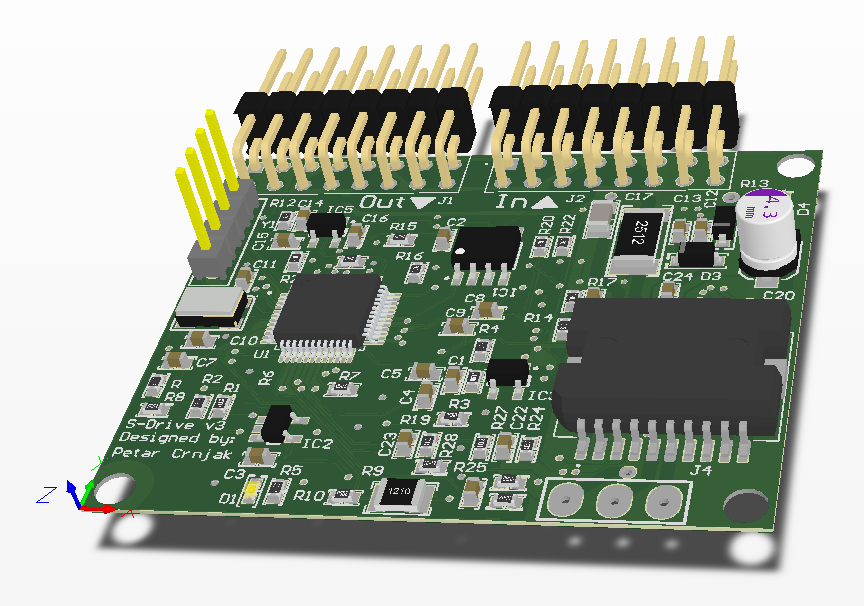
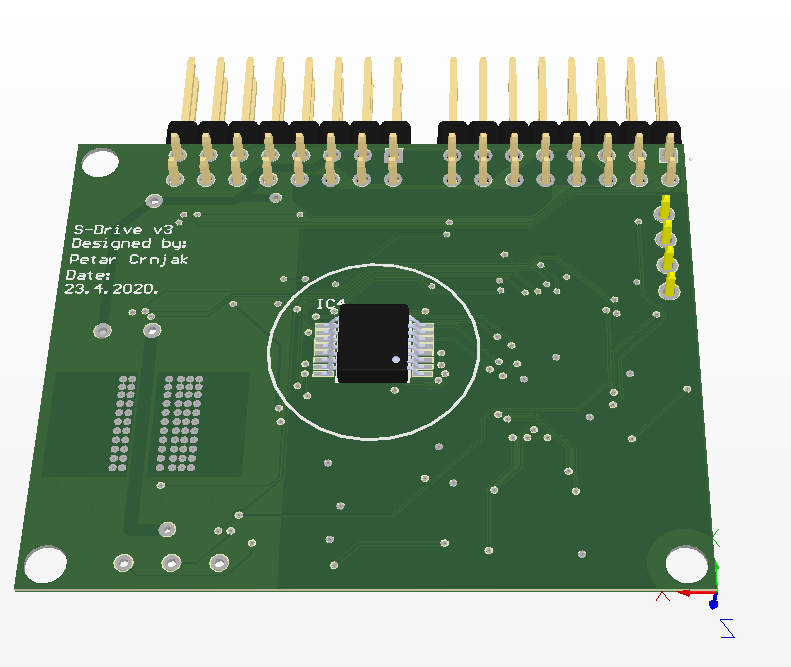
Petar Crnjak3rd version of board has these features:
- FOC control
- Small size of 50x41 mm
- 40 KHz switching
- 40V input
- 5A Max output
- Current sensing
- BEMF sensing
- AS5040 Build in AS5040 10 bit encoder
- Mosfet temp shutdown
- Extra EEPROM memory
- 2 Mhz UART comms
- Status LEDs
- Motor temperature mesure ( Not yet implemented)
- RS485 comms ( Not yet implemented )
- Daisy chain multiple boards ( Not yet implemented)
Best way to demonstrate what this drive can do is thru videos so check ones below :D

 John Taylor
John Taylor
 Zdenek Hurak
Zdenek Hurak
 Christopher Xu
Christopher Xu