 Marc Alefsen
Marc AlefsenEver heard of phyllotactic spirals ? John Edmark was inspired by these naturally occurring leaf patterns to create a series of sculptures he called “Blooms”.
This is the starting point for our project, Phyllo, that you can follow on our students' blog.
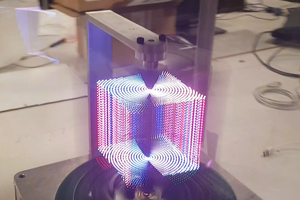
As John Edmark explains in this instructable, he spins a Bloom under a stroboscopic light to create the illusion of a flower blooming.
In our project, we will build upon this and:
- Color each petal individually from the inside with stroboscopic LEDs.
- Play colorful animated patterns on the sculpture (such as falling or rising petals, lines, spirals, rings…).
- Display animation patterns across neighbouring phyllos: when two sculptures are close enough, they can synchronize and the animations will propagate from one to the other, creating globally coherent phyllotactic patterns.
Here are some 3D simulations to give you an idea what it could look like:


We will keep you posted as the project moves forward. Stay tuned ! You can find any information or update on our logbook. Feel free to comment, any suggestion or idea is much welcome :)



































 Alexis
Alexis
 Jarrett
Jarrett
 Maximiliano Palay
Maximiliano Palay
 Matthias
Matthias