 Yannis
YannisTinymovr R3 boards have recently arrived from China and I've been busy testing and improving things all over. Bottom line, they perform very well so far!

The new MA702 encoder really makes a difference as angular position tracking is now super responsive and able to handle even the most vigorous accelerations. Due to the improved dynamic tracking performance, commutation is also more efficient, as the electrical angle is tracked much more precisely. The advertised mean accuracy of 11.5bits is easily achieved and even surpassed with a NdFeB N35 magnet at around 1.5mm distance from the chip, and with the addition of a Luenberger observer I get an accurate (low noise) 13bit position estimation (8192 CPR).
The new PAC5527 controller also makes a difference since it enables the input voltage to go up to 30V, limited by the power transistors (FDMD8530). I have tested the board up to 26V input and 15A phase current with reliable performance. More tests pending :)
For safety reasons, however Tinymovr will be rated to 24V. In addition, PAC5527 allows for software slew rate control, using which and after some experimenting I ended up with much better commutation with less ringing.
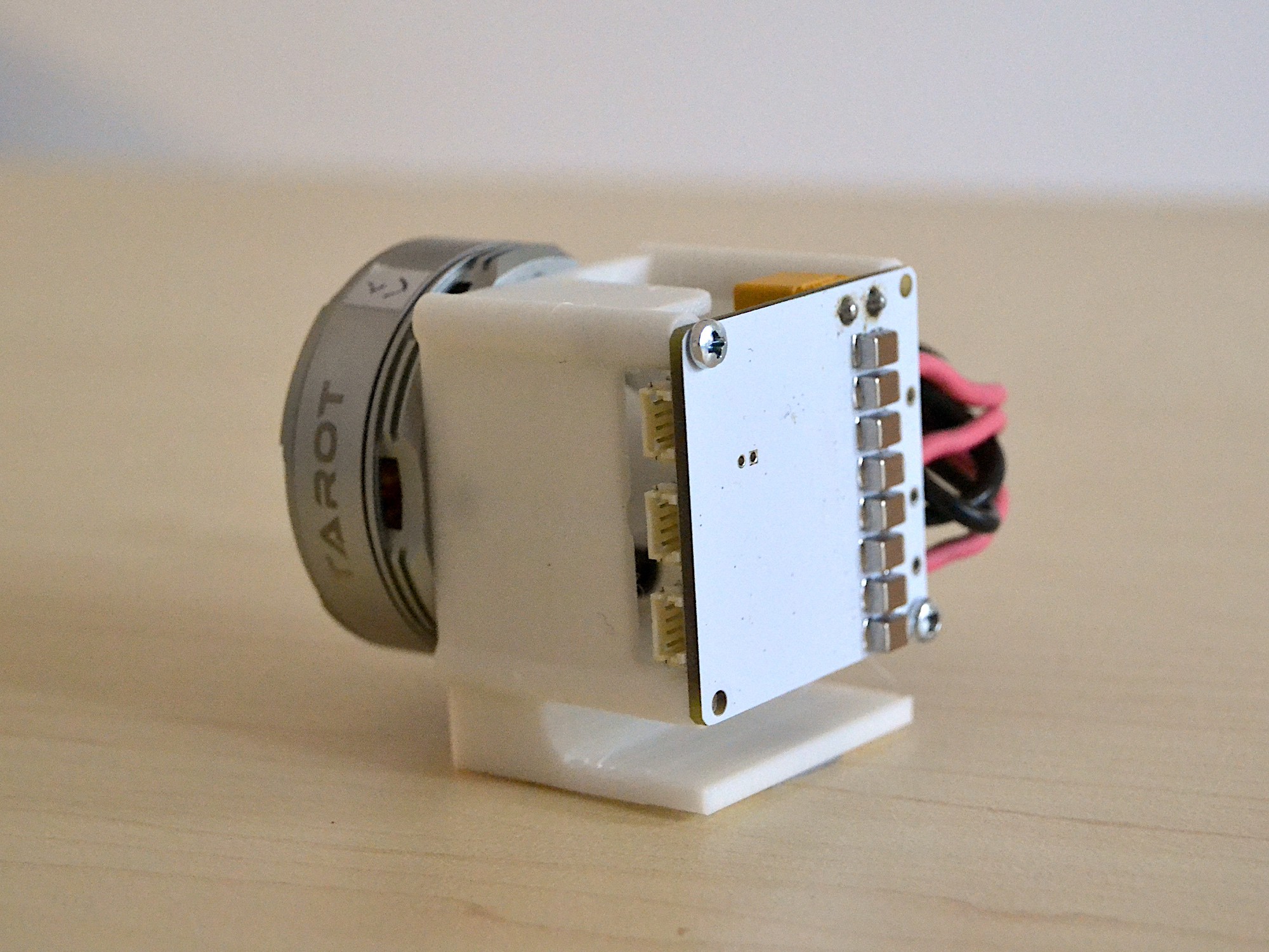
Tinymovr R3 has more capacitance than it's predecessor with 8x 10uF ceramic capacitors and 3x 4.7uF on the shunt resistor high side, however these will be replaced with a combination of ceramic and electrolytic in R3.1. R3 also features CAN Bus, UART and SWD connections, each of which is broken out to DF-13 connectors, however to manage compoment costs R3.1 will only break out CAN Bus to DF-13, while others will be available as through-holes on board. In addition, there are through holes sized to accommodate a XT-30UPB connector that can be mounted on either side of the board.
Here's the board mounted to the test stand together with a 4108 380kV motor:
That’s it for now, but stay tuned for the next post very soon where I will discuss test results and firmware development, together with some good news :)
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.