 Cloud4RPi
Cloud4RPiOur Equipment
We have a SAECO Aulika Focus coffee machine. Up to this day, we used a hand pump to fill the machine’s water tank from a standard 5 Gallon (19L) water bottle.
Our Goals
- Use an electric pump driven by some kind of a controller or a microcomputer through a relay.
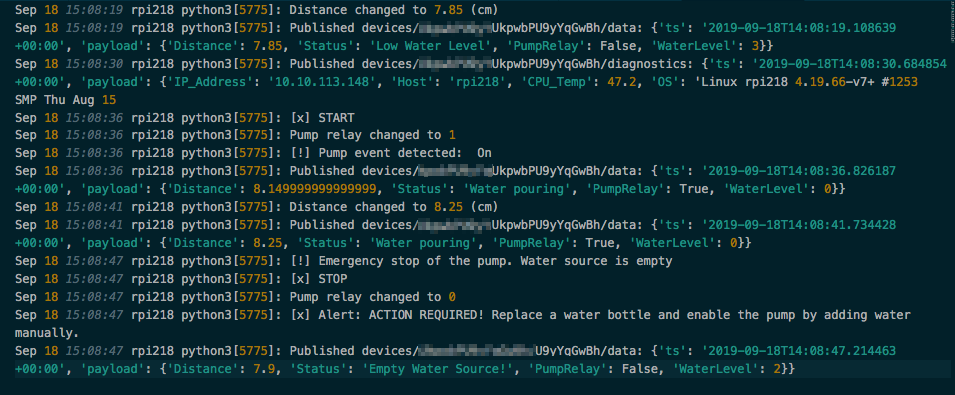
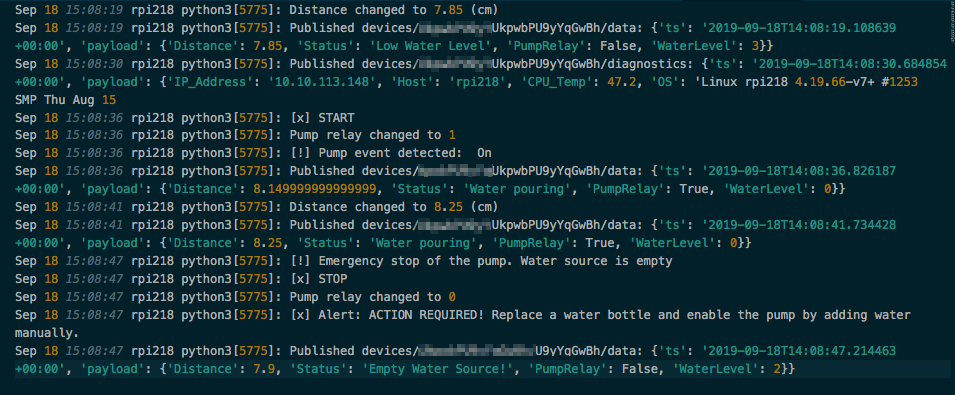
- Have a way to measure the water level in the coffee machine’s tank so our system knows when to refill it.
- Have means to control the system, preferably in real-time from a mobile device.
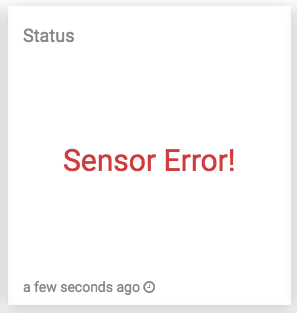
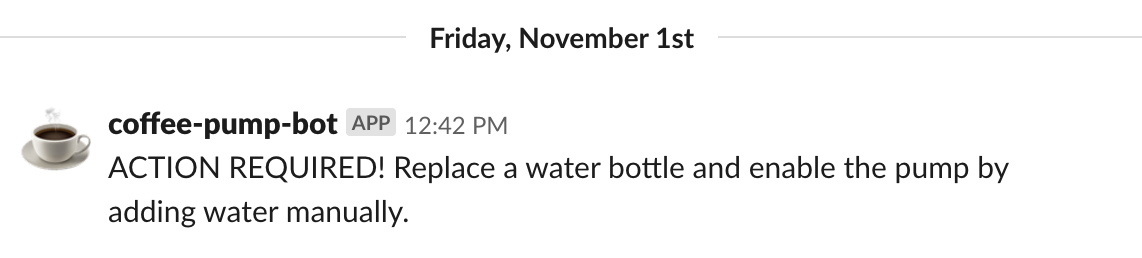
- Receive notifications (through Slack or a similar service) if anything goes wrong with the system.
The Assembled Coffee Machine Pump System:









 Kyle Gabriel
Kyle Gabriel
 Michael Hamilton
Michael Hamilton
 ump
ump
Now you can download any Caterpillar Repair Manuals from our website https://caterpillarworkshopmanuals.com including excavators, Backhoe loaders, Engines...