I will constantly update the progress of the robot on the log, along with pictures and videos if necessary. Some changes like coding changes will also be posted if some are making a Penguin of their own or some sort of robot that does something similar :)
Do comment if you have any questions or even suggestions! I'll try to help out if I can
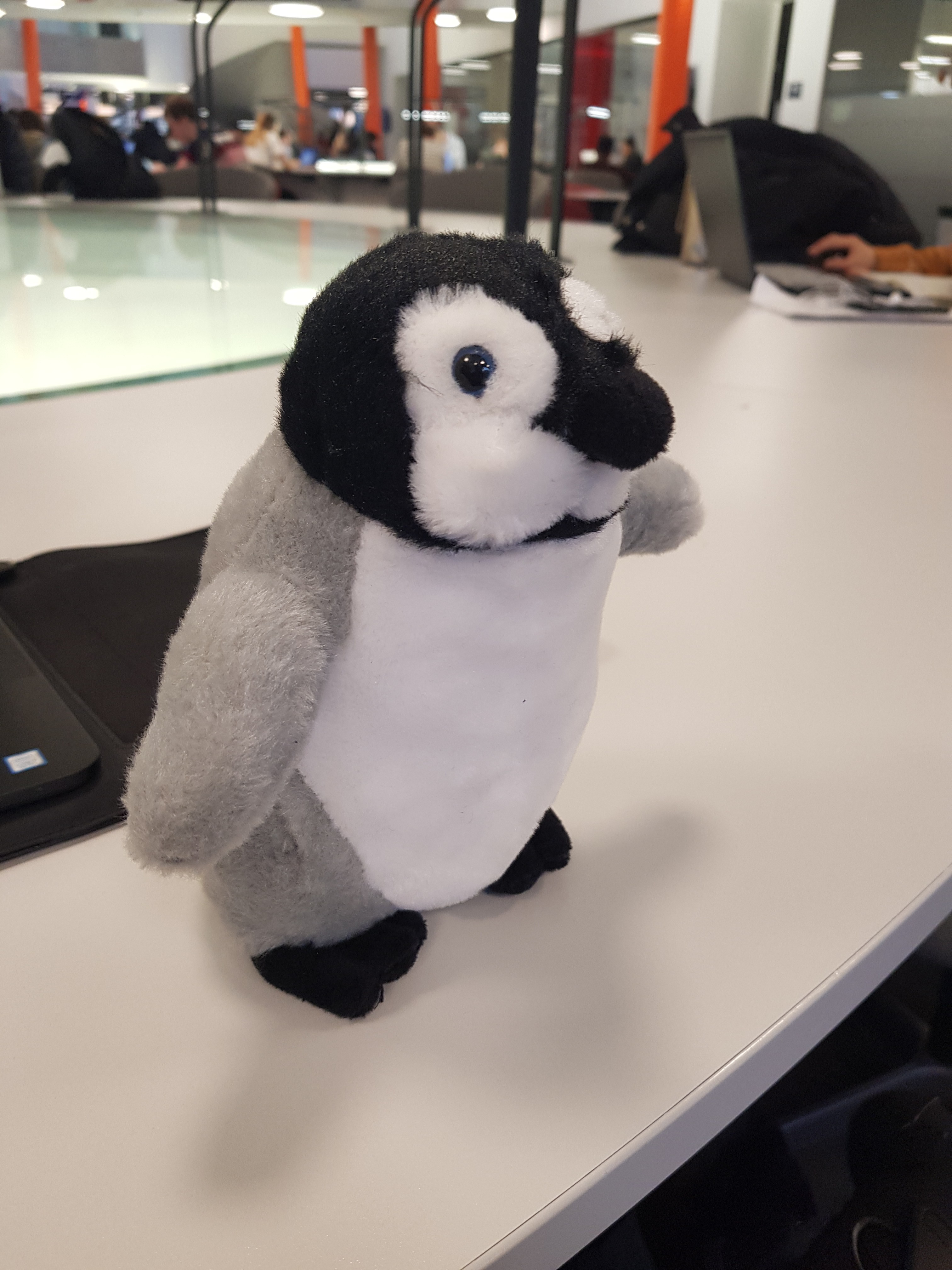 An animal had to be chosen for making the companion robot. I have narrowed down my choices to three: an Owlet, Baby Penguin and a Wombat. Through several comparisons in multiple categories such as cuteness, basic knowledge on the animal and ease of mobility, the Penguin won the selection.
An animal had to be chosen for making the companion robot. I have narrowed down my choices to three: an Owlet, Baby Penguin and a Wombat. Through several comparisons in multiple categories such as cuteness, basic knowledge on the animal and ease of mobility, the Penguin won the selection.


 invent2main
invent2main
 Cole B
Cole B
 deʃhipu
deʃhipu
 Dimitris Xydas
Dimitris Xydas
This is such an interesting project! Really excited to see it when it is operational. I was wondering how you will tackle any stability issues to keep the penguin upright after it performs some actions?