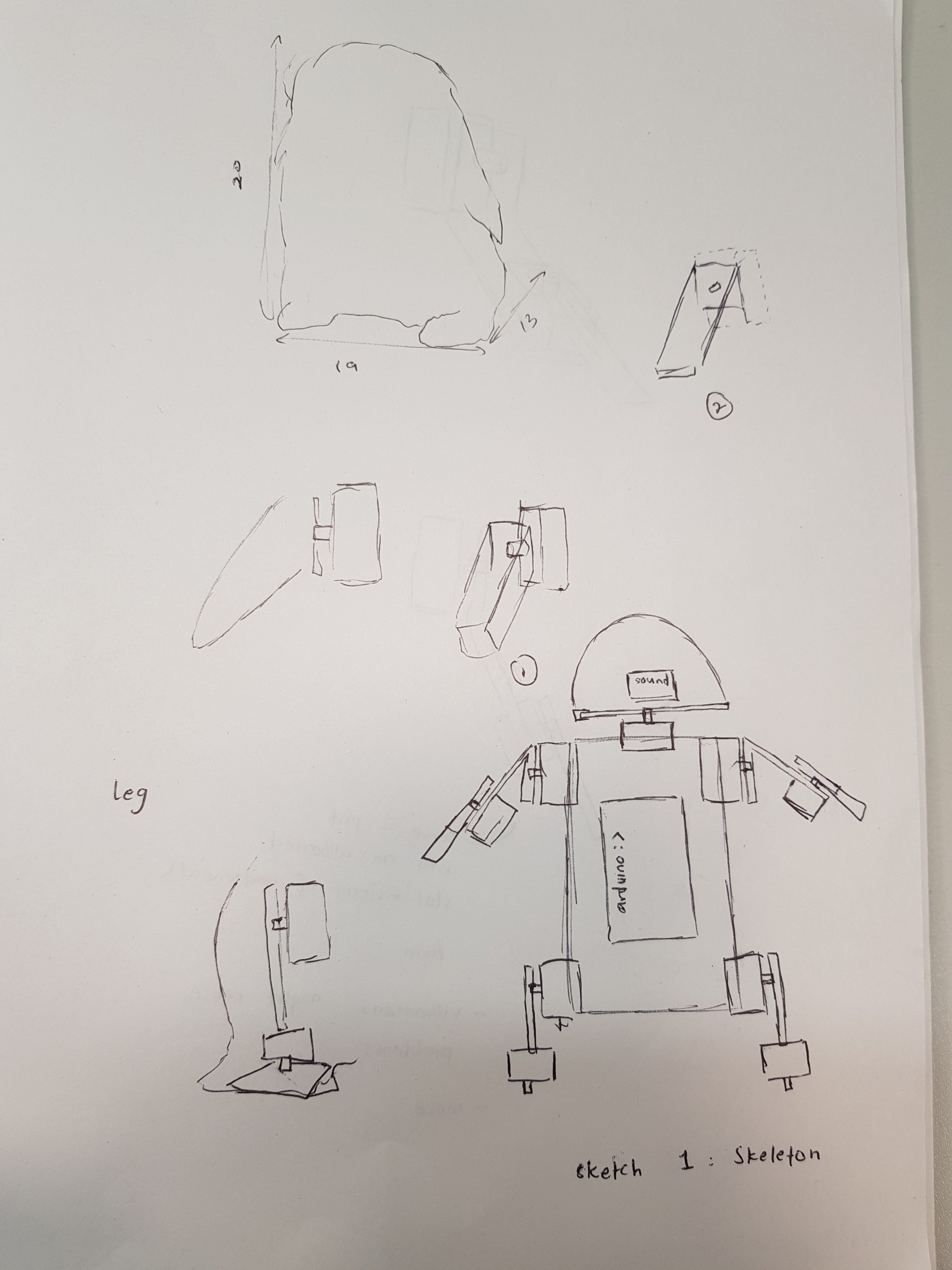
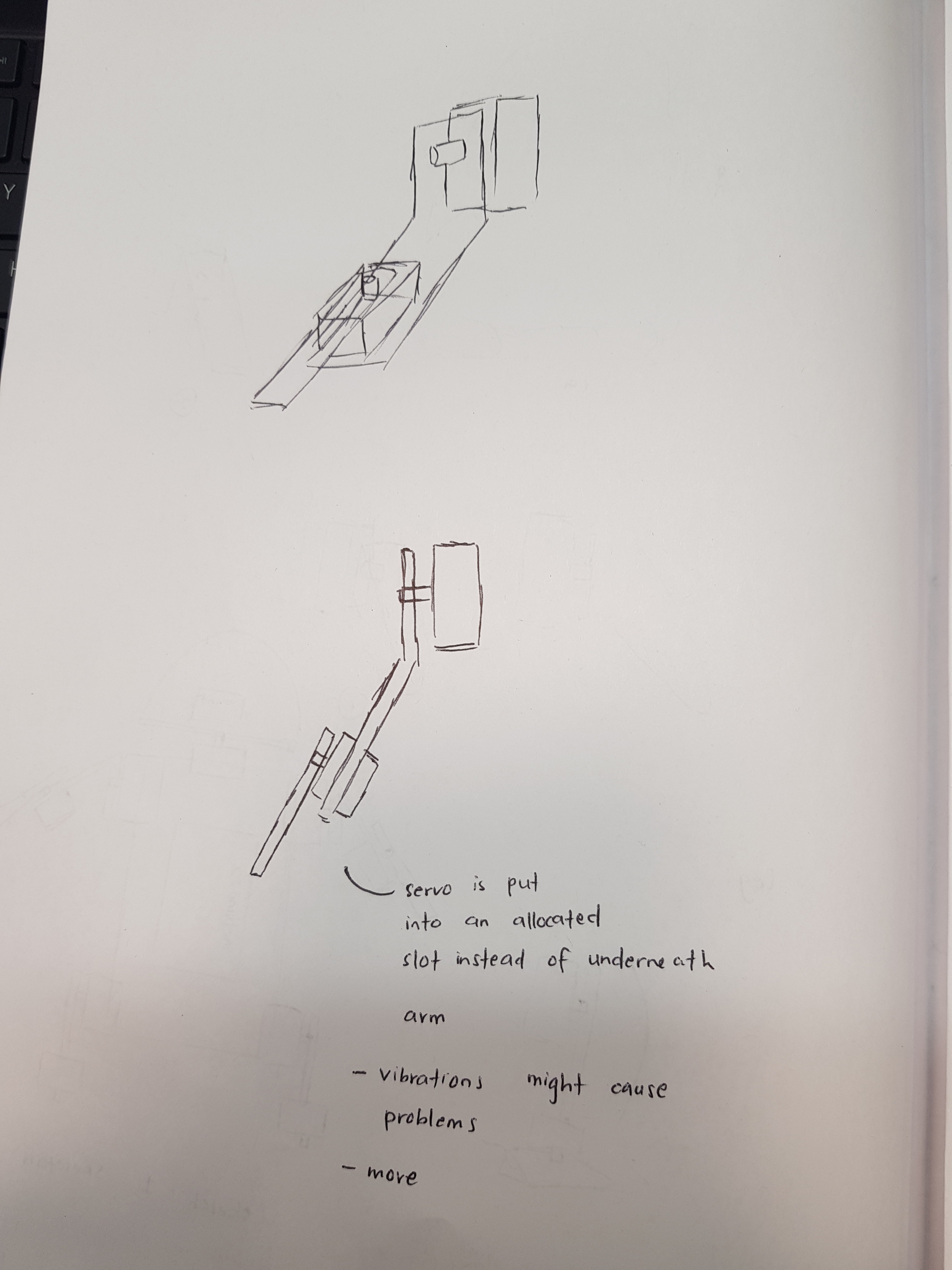
Initial skeleton design was made by considering the size of the plushie bought, and the number of servo motors available (more can be taken, but I settled with 9 first to make it simpler). The servos are attached to the main body, which would be the Perspex cut into a square shape and then attached to a board which would rotate. On the rotating board, servos would be attached so it would support more articulation of the limb. Several iterations were made so that if the first didn't work, the others might.
3D printed parts might work, but I will start off with laser cut parts first as it would be less time consuming. Only after I managed to work out the movements and the motion capabilities that I would consider creating a custom part for the Penguin
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.