 Angela Sheehan
Angela SheehanThe most important part of this project, and new skill for me, was creating natural and whimsical movements. One of the most compelling things about the companion bots I have interacted with is their randomized movements that begin to feel like responses to their environment.
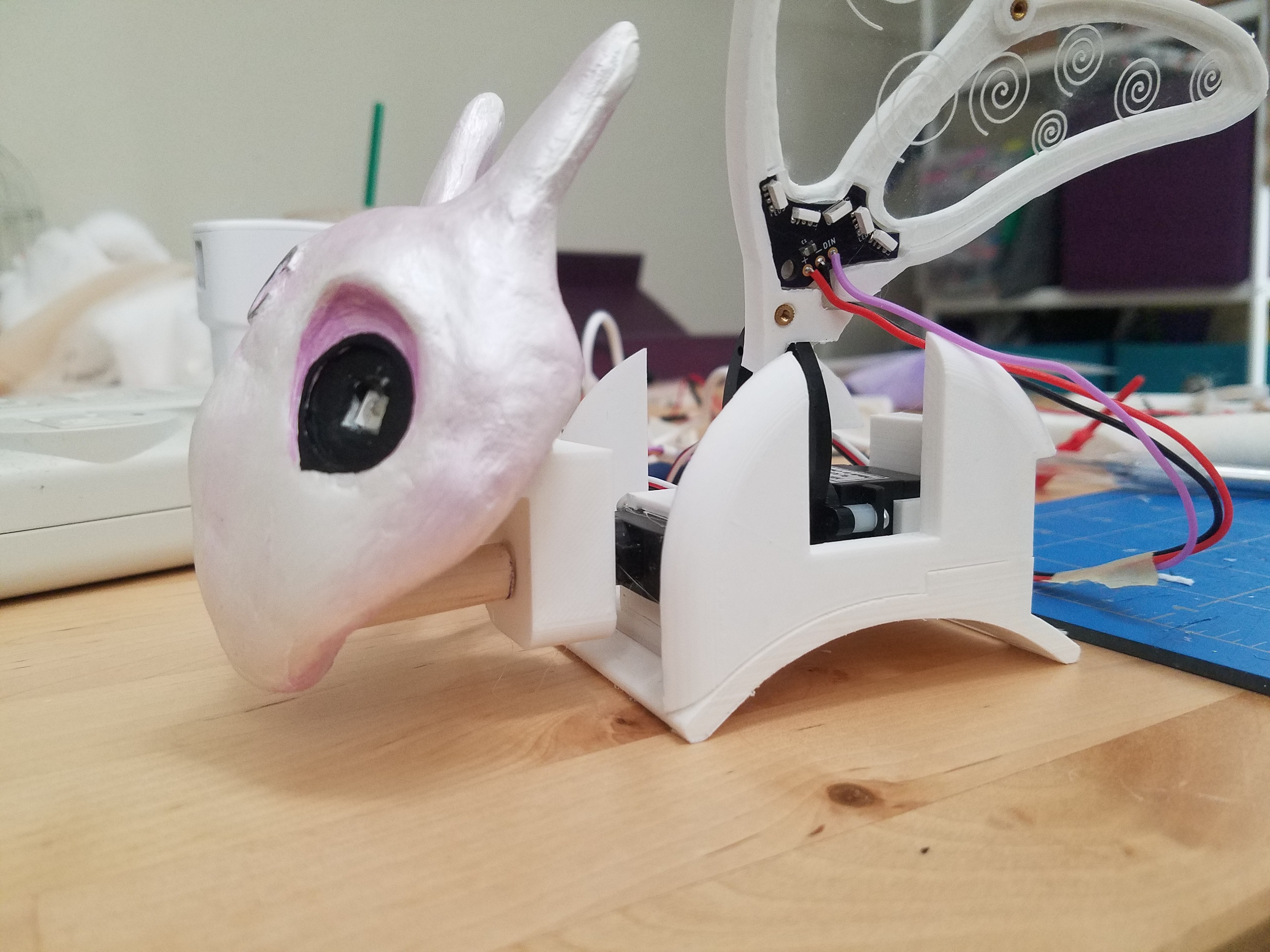
My first challenge was how to create flapping wings with the least amount of parts. After a lot of research and thought, I came across a gripper attachment for a servo that looked like it might be adaptable for a coordinated wing flap - eliminating the need for two servos to drive her wings.
This worked far better than I expected! I adjusted the 3D printed wing enclosures to include a notch that matched the profile of the gripper arms. To install them, they are press fit on the arms and stay relatively secure. Over time, the print has been wearing down where they attach, so I am going to upgrade with a bolt or other fixture point for long term stability.

I programmed the movement of the wings to have a 'resting' pattern of occasional flaps, with a more excitable flapping when she is activated by a touch sensor on her face. Below is a video from early prototyping of adding the touch sensing to trigger color changes in her wings.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.