 kmatch98
kmatch98-
1Planning for Chaos
Starting
When I set out on this project, I was recovering from a killed project, a single servo-driven binary clock. I had just learned fusion 360 and jumped into a big project that was too much too fast. The Geneva Drive worked fine but there were too many little pieces that didn’t fit right. I set it aside but the desire for a mechanical binary clock remained.In parallel I wanted to learn how to drive stepper motors. I started with the Adafruit crickit and a few random steppers my dad scavenged from the scrap heap. I found out how to debug the connections on the stepper motors and then was able to get these steppers waving flags.
So I graduated to buy some A4988 step sticks. Got those working with the steppers but they were WAY noisy. Read up about some silent steppers from Trinamic (TMC2208) and got those in and tested. Awesome, almost silent movement.
The next big step was to start planning the robot arm. I read through quite a few folks making SCARA robot arms. I was especially inspired by this one by JJRobots (https://www.jjrobots.com/scara-robotic-arm-by-jjrobots/). And this clock specific two link arm by aerobic (https://www.thingiverse.com/thing:1866169).
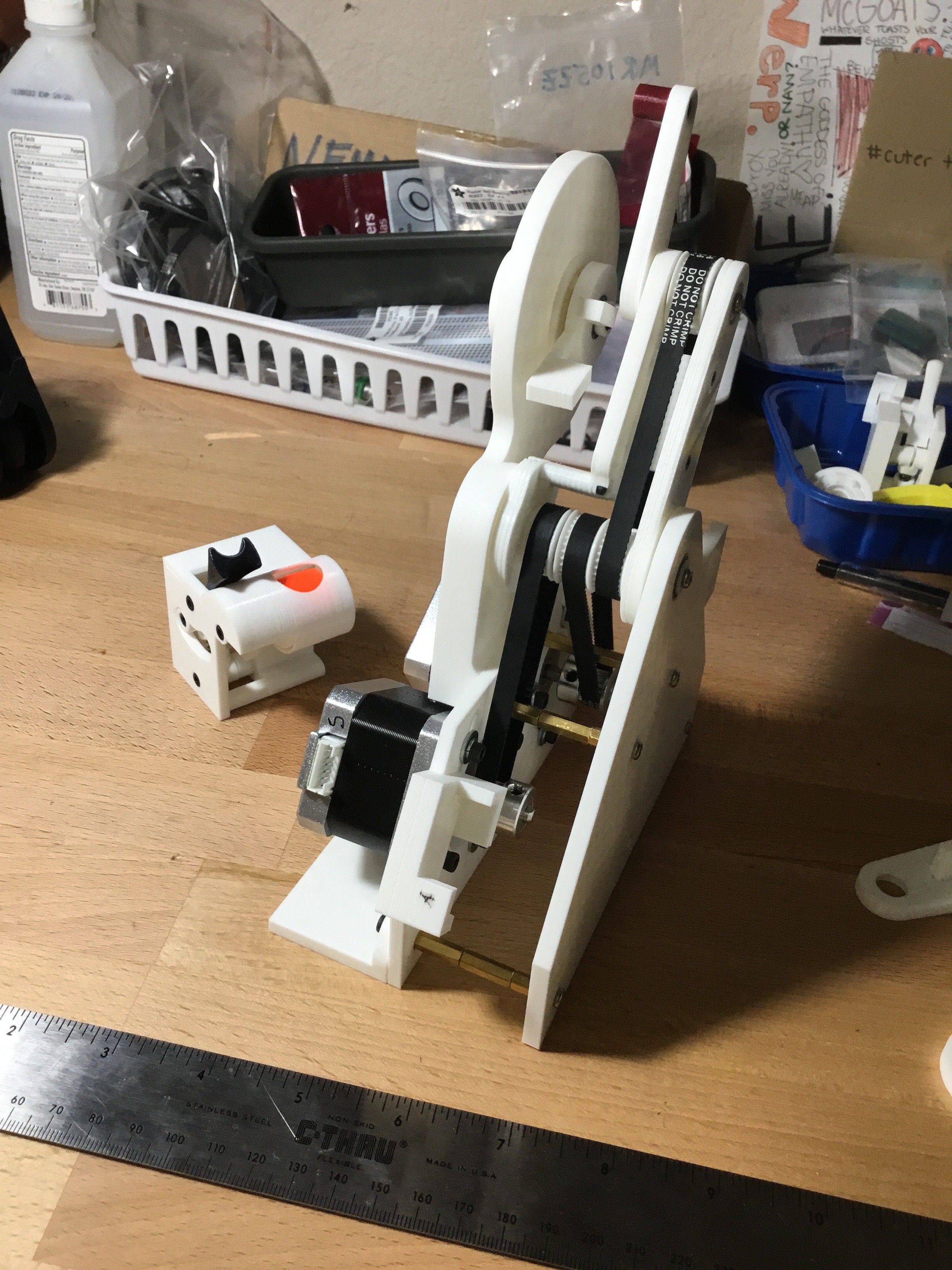
I targeted a two link arm, so I need two steppers. I bought some NEMA 17 motors. Originally I considered minimizing the footprint of the motors, so I wanted to directly connect one stepper to a gear, but the short shaft of steppers prevented that. So the fall back plan was to use two belts. This ended up being a wise choice since the coupling with belts give some room to accommodate some errors and take up the slack with the belt flex. I chose GT2 belts. I would have preferred narrower belts, but the 6mm width is more readily available (maybe change this in the future).
next problem: Bearing and Shaft selection.
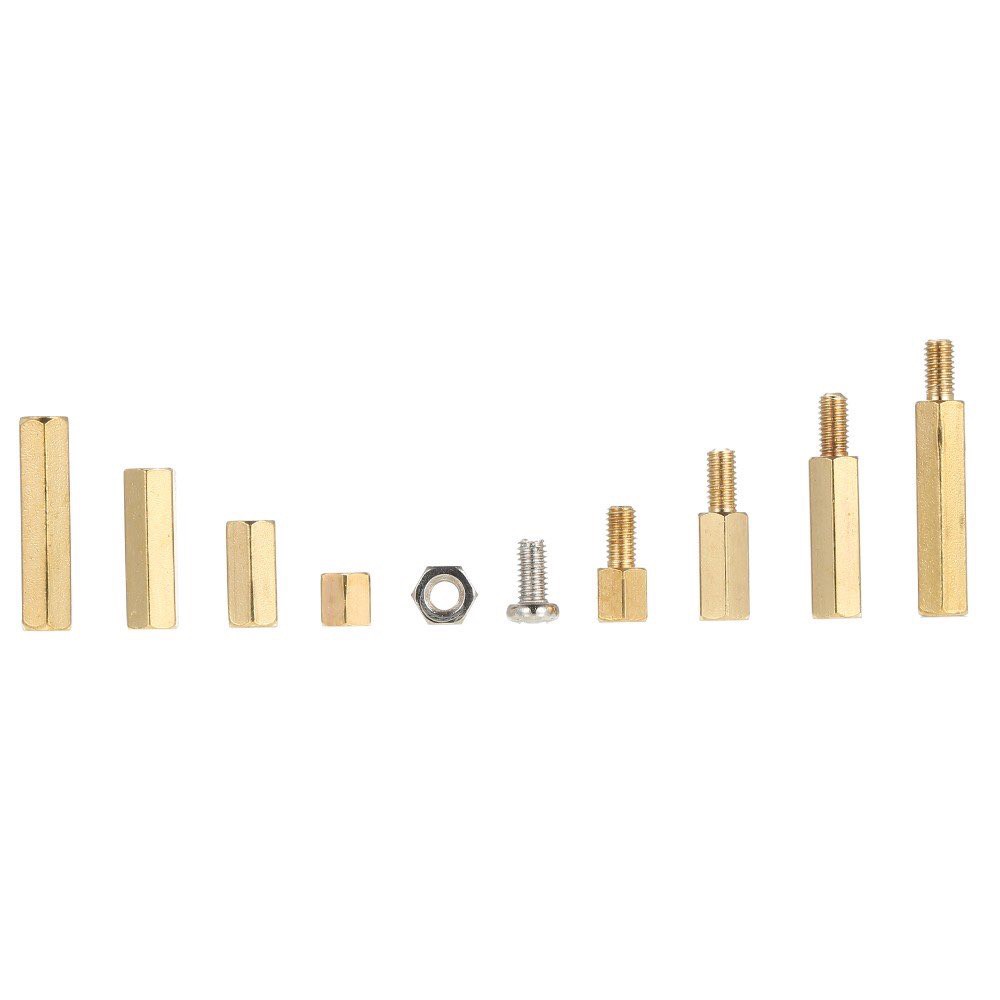
I was going to 3D print everything other than the stepper gears. So, I needed a way to use 3D printed shafts and gears. My main problem was how to make threaded shafts with 3D printing. I gave up on that, and found a solution I HIGHLY RECOMMEND! I needed shafts that were threaded in both ends but we’re small enough to fit through relatively small bearings. I landed on using 5mm hex standoffs.
![]()
![]()
A benefit of using these hex standoffs is they are inexpensive for a decent kit, have threads in both ends, and come in 5mm length increments. Some in the kit have bolts on one end, so you can build up the length of what you need, within 5 mm increments. And the threaded ends make it easy to bolt to the ends.
To use these 5mm shafts I needed bearings with a large opening. I found these MR128 bearings. They have dimensions of inner diameter of 8mm, outer diameter of 12 mm and thickness of 2 mm (8x12x2mm). As shown I the picture above, this leaves room for the 3d printed shaft to wrap around the 5mm hex shaft. To add some strength to the 3D printed shaft, I ran the soldering iron along the side to melt them a bit. Then I fit them into the bearing. Also keep in mind that the hex shaft can help bear some of the load.
I spent a lot of energy on the previous items. After that it really was just about executing the plan. Of course there were many iterations to get everything to fit. See my “land of misfit prints bin”:
![]()
By having the almost infinitely adjustable 5mm hex shaft length and a bin of M2/3/4 bolts, I didn’t have to be slowed down by waiting for bolts or shafts.
![]()
-
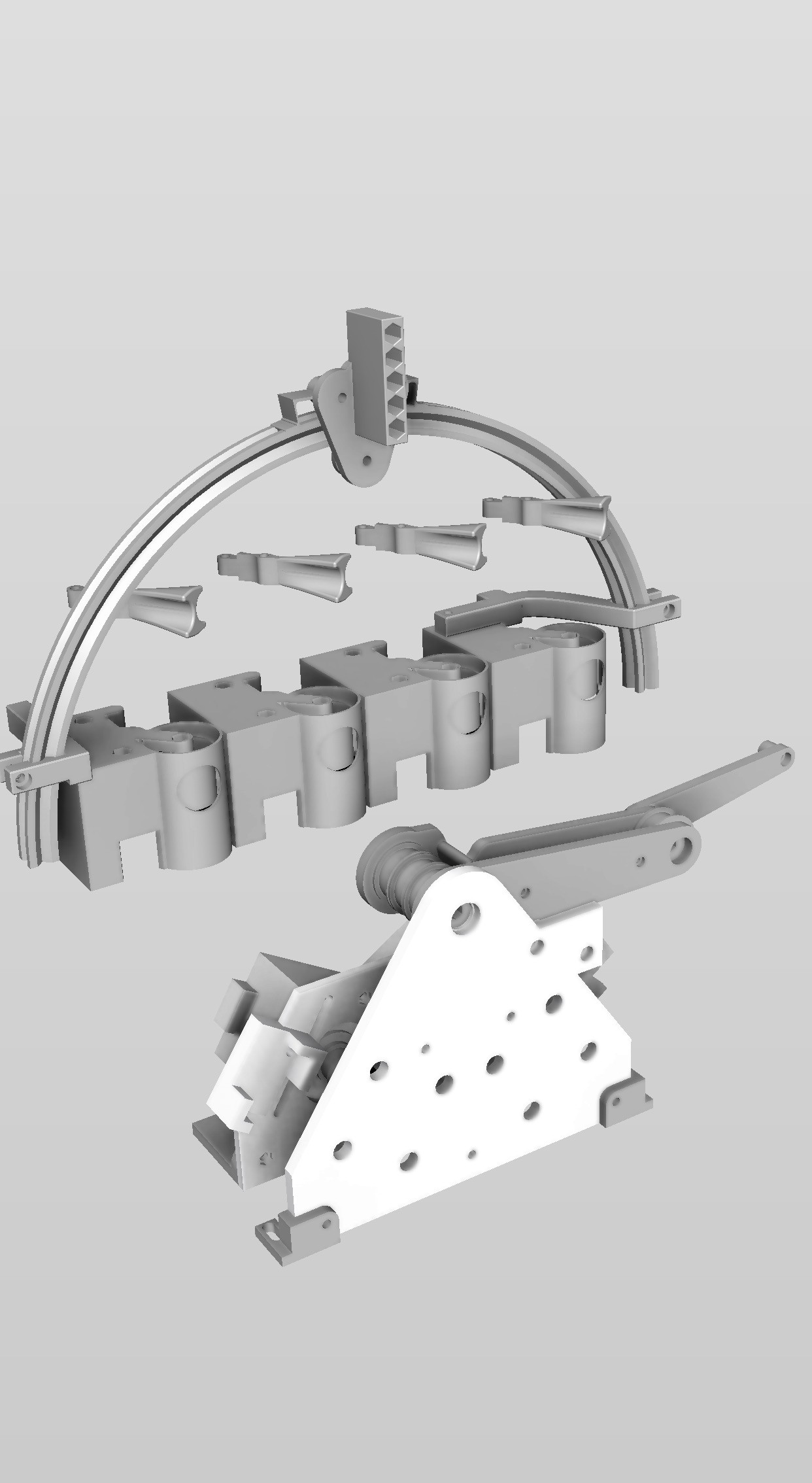
2SCARA robot design
![]()
The shoulder link ended up as three pieces connected by M2 bolts. Original one piece designs failed miserably. By breaking it into three pieces (1) it was stronger than a full 3d printed version and (2) I could re-use some of the pieces if there were minor tolerance adjustments required.
An ASIDE: Changes are going to happen! Don’t fight them, but make them easier to happen. Flow with it! Gravity always finds its way downhill!
The photo above is a simpler version of the two link arm with a dial indicator.
Other struggles
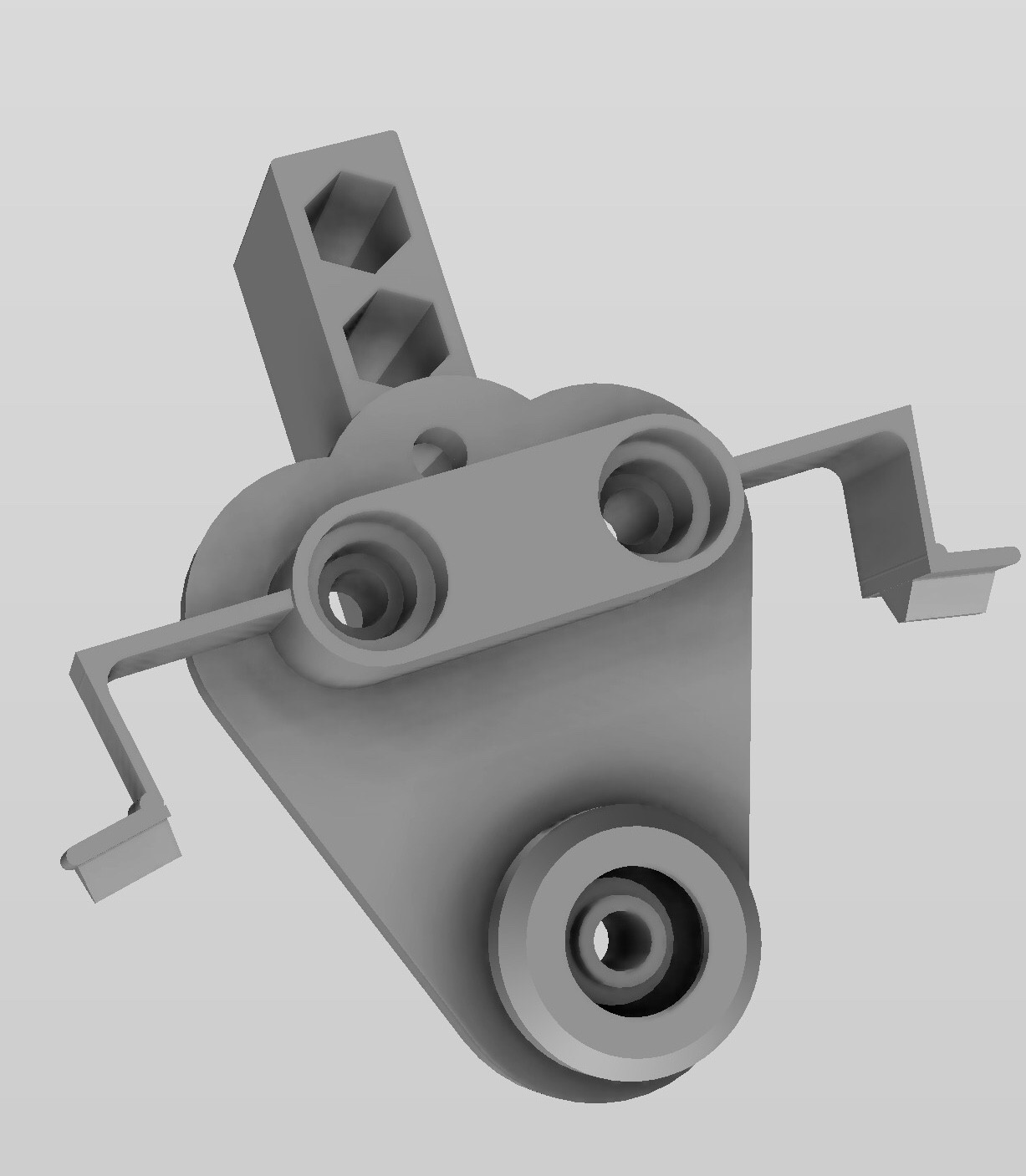
other struggles: I made several revisions of the shaft connection to the fore-arm. I had several versions with weak alignment keys that broke. I ended up with this version:![]()
![]()
I used this dual D shaft. It’s not perfect but much stronger than some previous keyed versions I designed. I ran the hot soldering iron along the pulley shaft to strengthen it a bit.
Other design notes: I wanted the forearm to have 360 degree rotation, so the length is controlled by my belt length. I needed up using 200mm GT2 belts for the steppers and 260mm GT2 belt for the forearm. Note: There is one transfer pulley at the shoulder joint to go to the arm.
![]()
-
3Switch indicators
I needed some binary indicators, and wanted some toggle switches. I looked up videos on mechanical bistable mechanism. There are a lot of good ones here with animation:
https://www.youtube.com/playlist?list=PLYSvJyRJwnGjqZ81BLl2rnDI_HX1n09oE
Sometimes they are called bistable switches or snap action mechanisms.Finally I ran across this good tutorial on a straightforward switch design by Elena Kamas:
https://www.elenakamas.com/bi-stable-toggle
Here is Elena’s toggle indicator, in action:
I followed this almost verbatim, but subtracted the sliding shaft on the spring. For my design the spring is the only thing between the upper and lower spring holders.Tip for Fusion360:
To get a quick feel for the geometry of the switch action, I used a sketch and created constraints. If you draw a few lines with the correct constraints you can drag some of the points around and observe the range of motion. If you use parameters for the different links you can adjust the lever lengths and see the impact on the motion.
https://twitter.com/CycleMatch/status/1220744316169195520?s=20
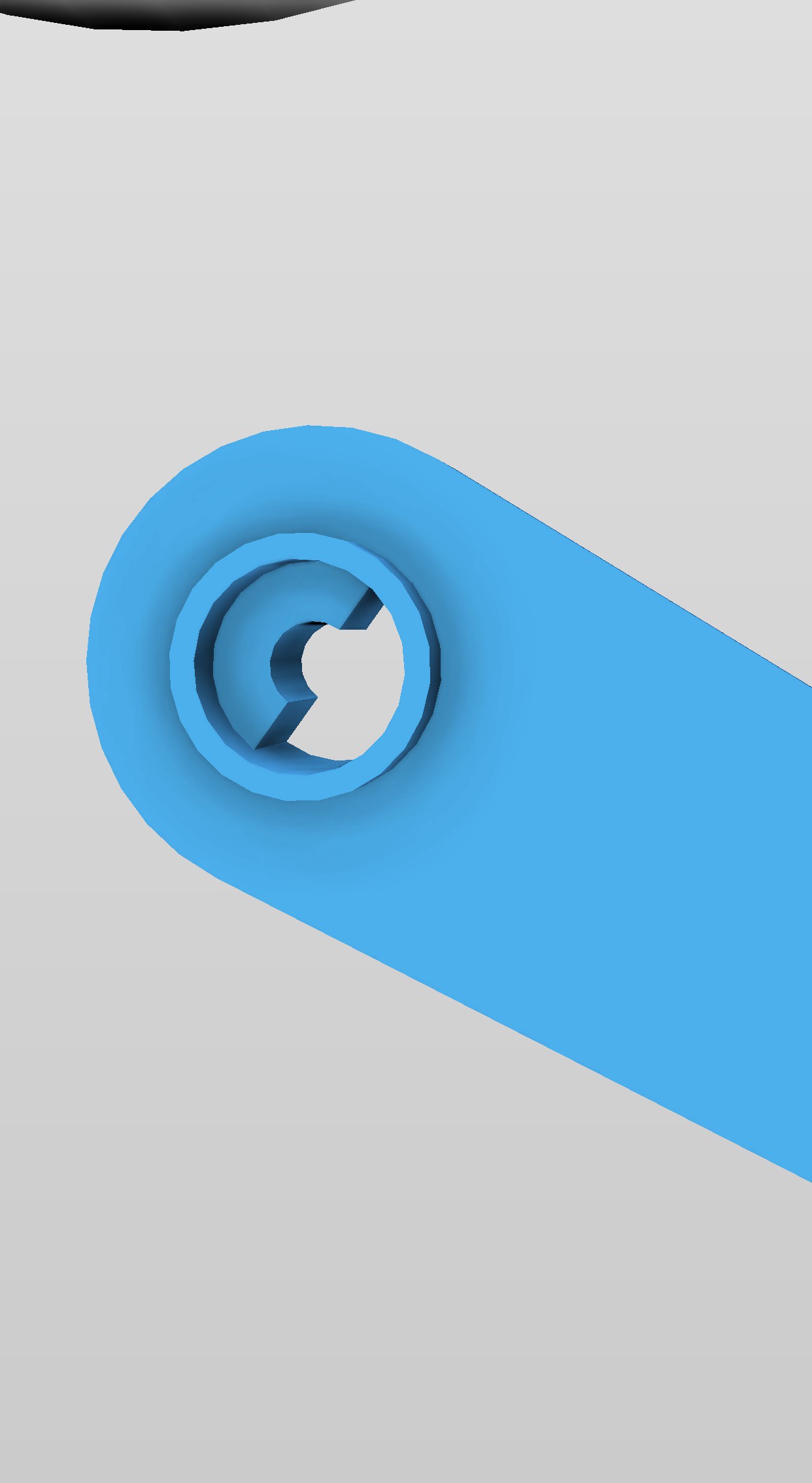
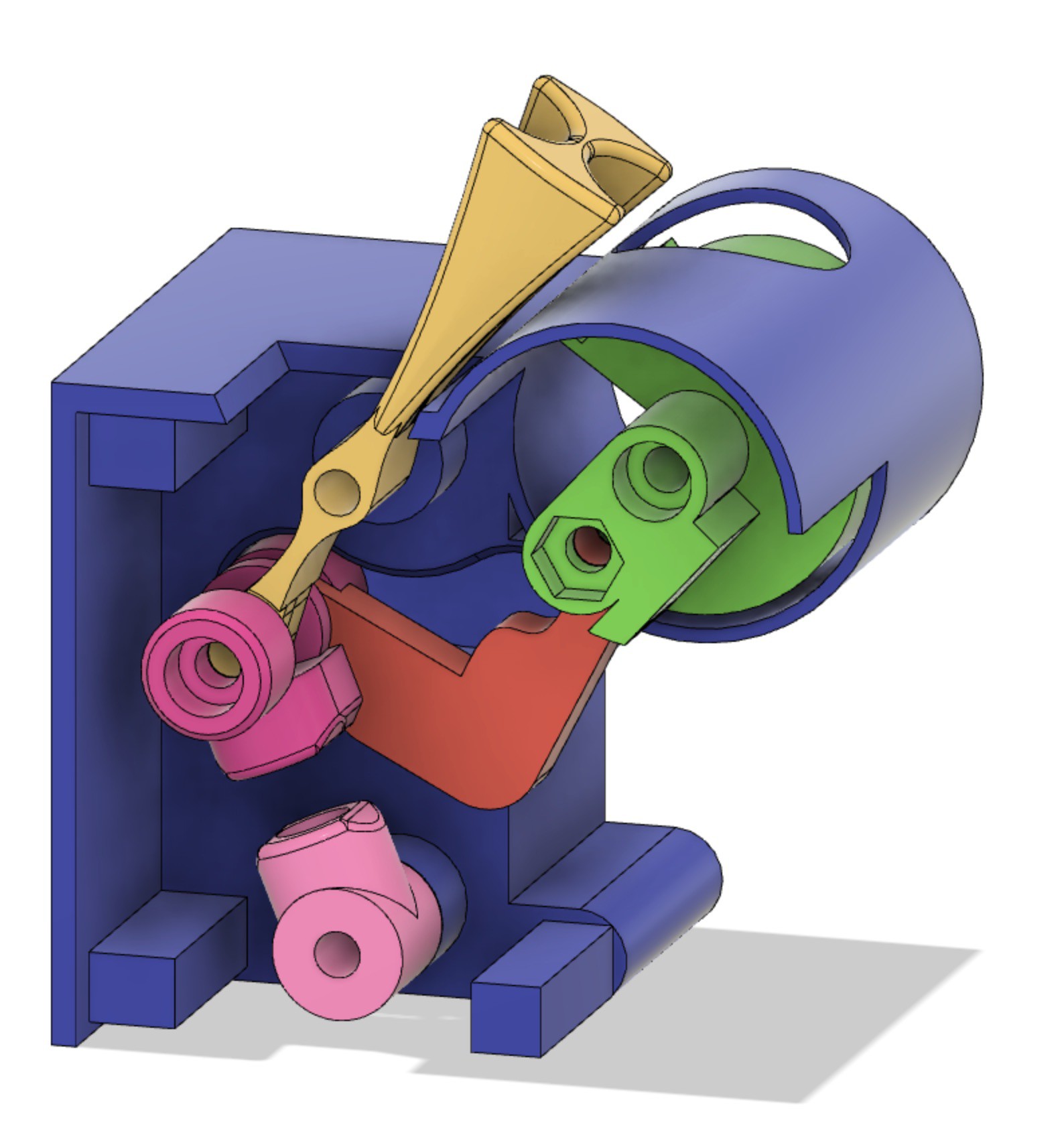
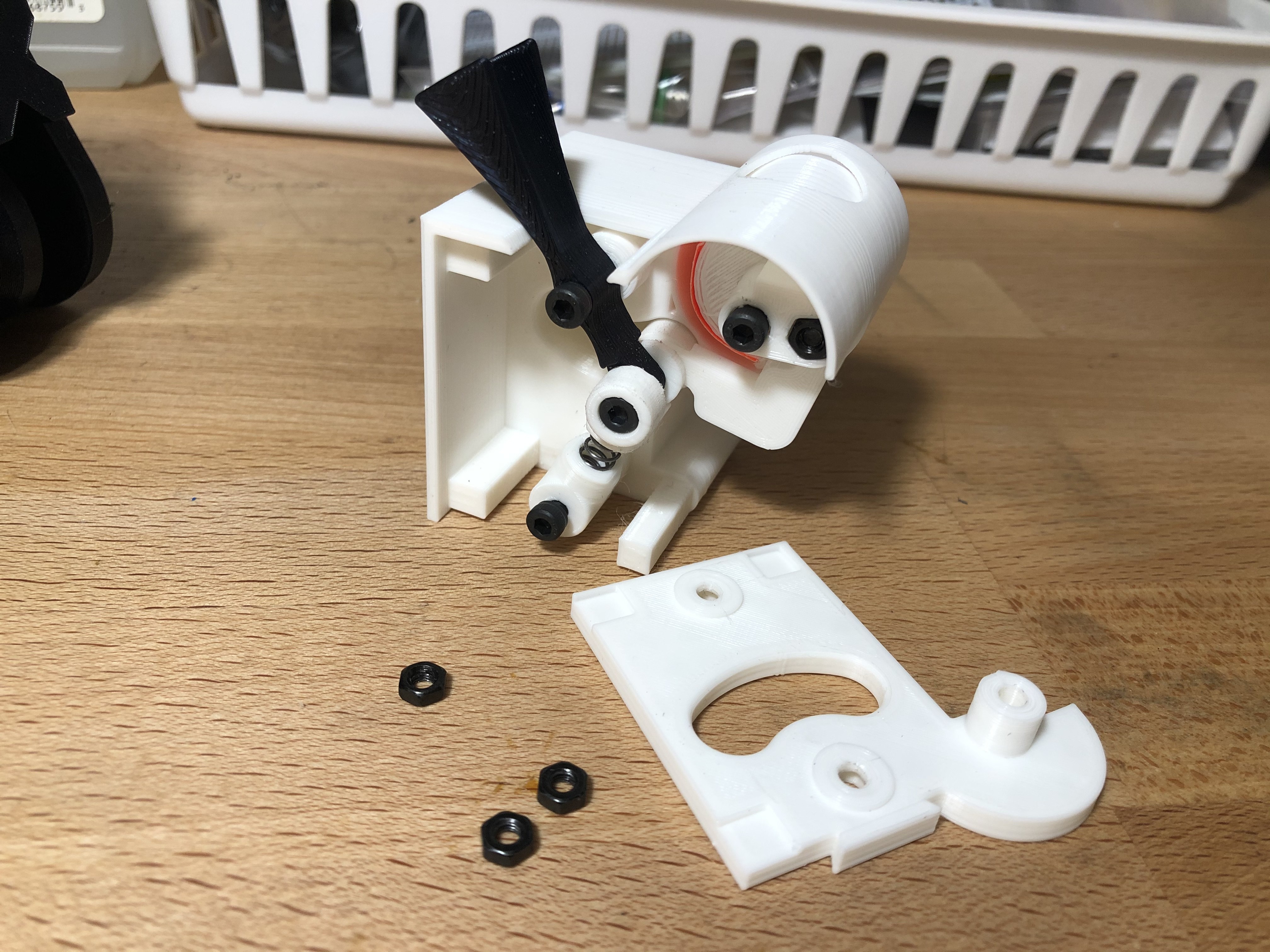
The switch indicator uses one spring at the bottom and a rotating dial with two colors:Here is a view with the front cover removed the curved slots in the switch are to make it easier to register with the robot arm’s end-effector.
![]()
![]()
The link between the switch lever and dial has an elbow to prevent interference with the indicator shaft. Also (not shown) the dial has rotation stops to keep it from over-rotating and getting at an angle where the link can’t pull or push it.
the Switch Land of misfit Prints![]()
And most especially: the LineUp of Switch Trials
![]()
Some Knolling with switch assembly:
![]()
![]()
-
4The Slider
Finally the top slider needed controlled friction.
![]()
I designed some extruded 10x10mm that printed just beautifully without support. That made the sliding surfaces very smooth.
I designed this “springy friction follower”. To control the amount of friction the key design parameters are the thickness of the spring arms and the amount of interference that was designed (by interference I mean how far these horizontal arms stand below the track if the track weren’t there). I added triangular protrusions on the spring arms to ensure the slider remains centered in the 10x10 track:
![]()
![]()
I am pointing to the springy part here.
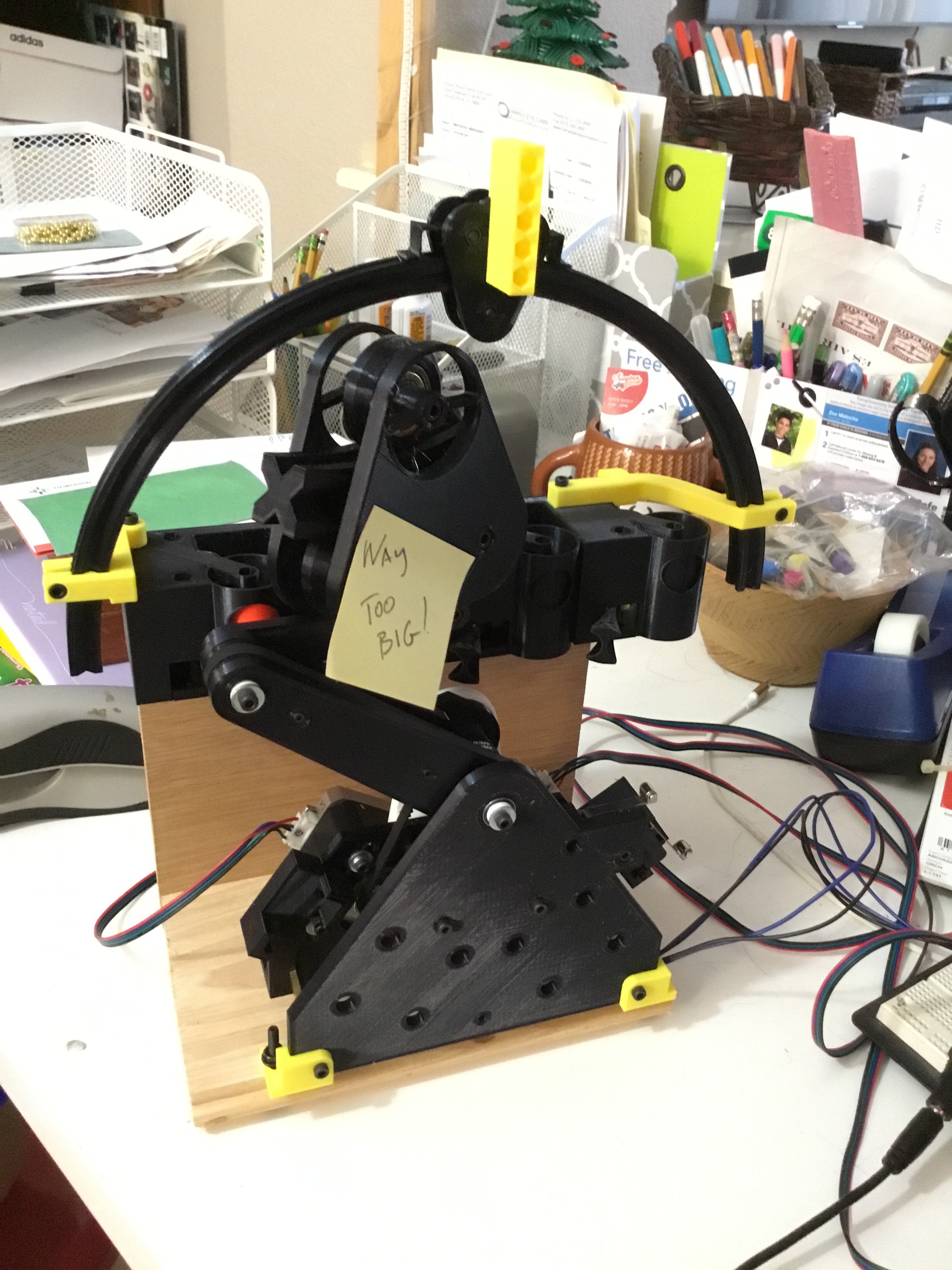
A Mishap
I started out using 608 bearings and 20x20 extrusion. WAY TOO BIG!
![]()
Temporal indicator: About every five minutes
I call it a temporal indicator but you may call it a clock. Topics Learned: steppers, reverse kinematics, bimodality and friction.










Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.