ekaggrat singh kalsi
ekaggrat singh kalsi-
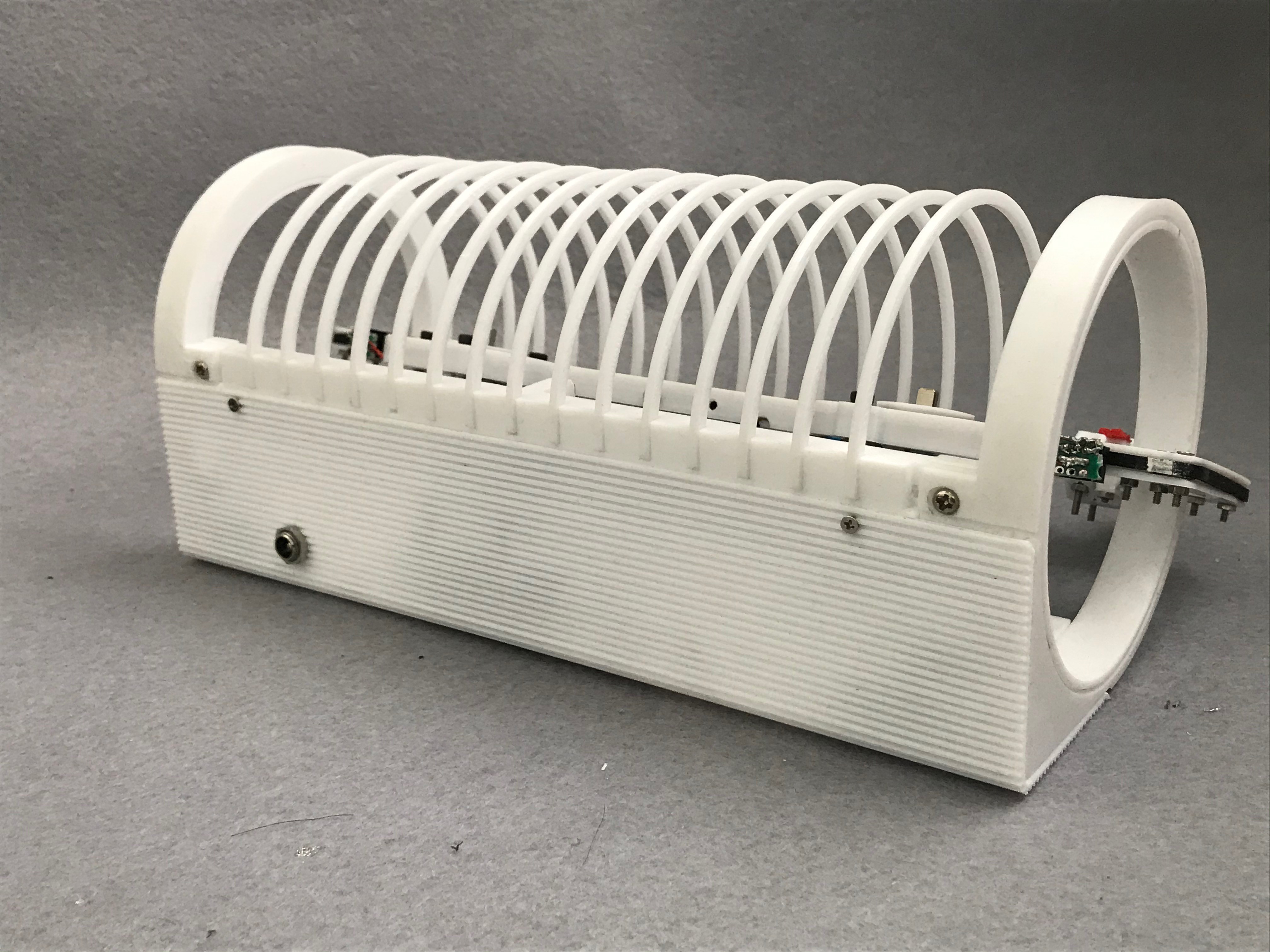
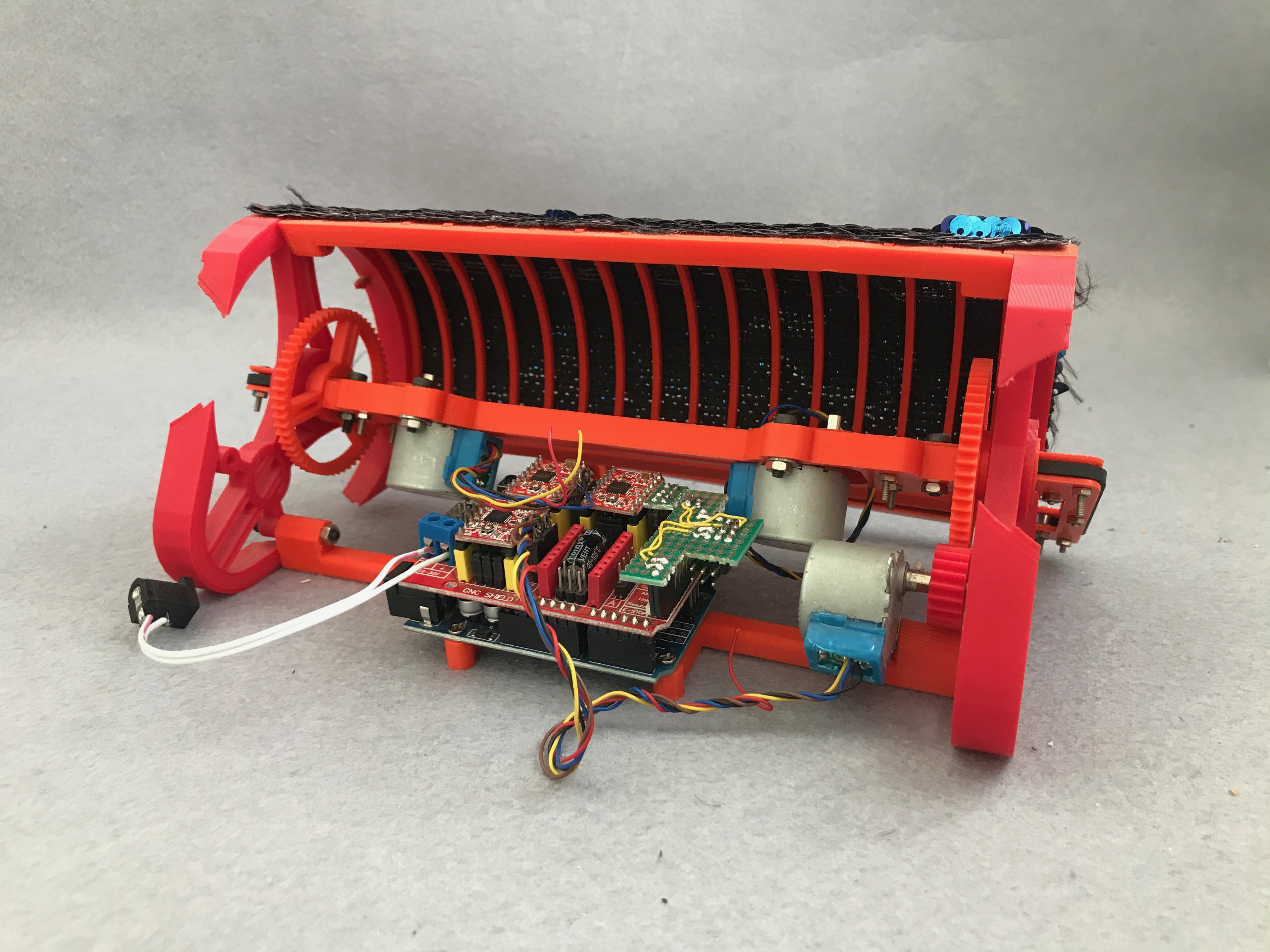
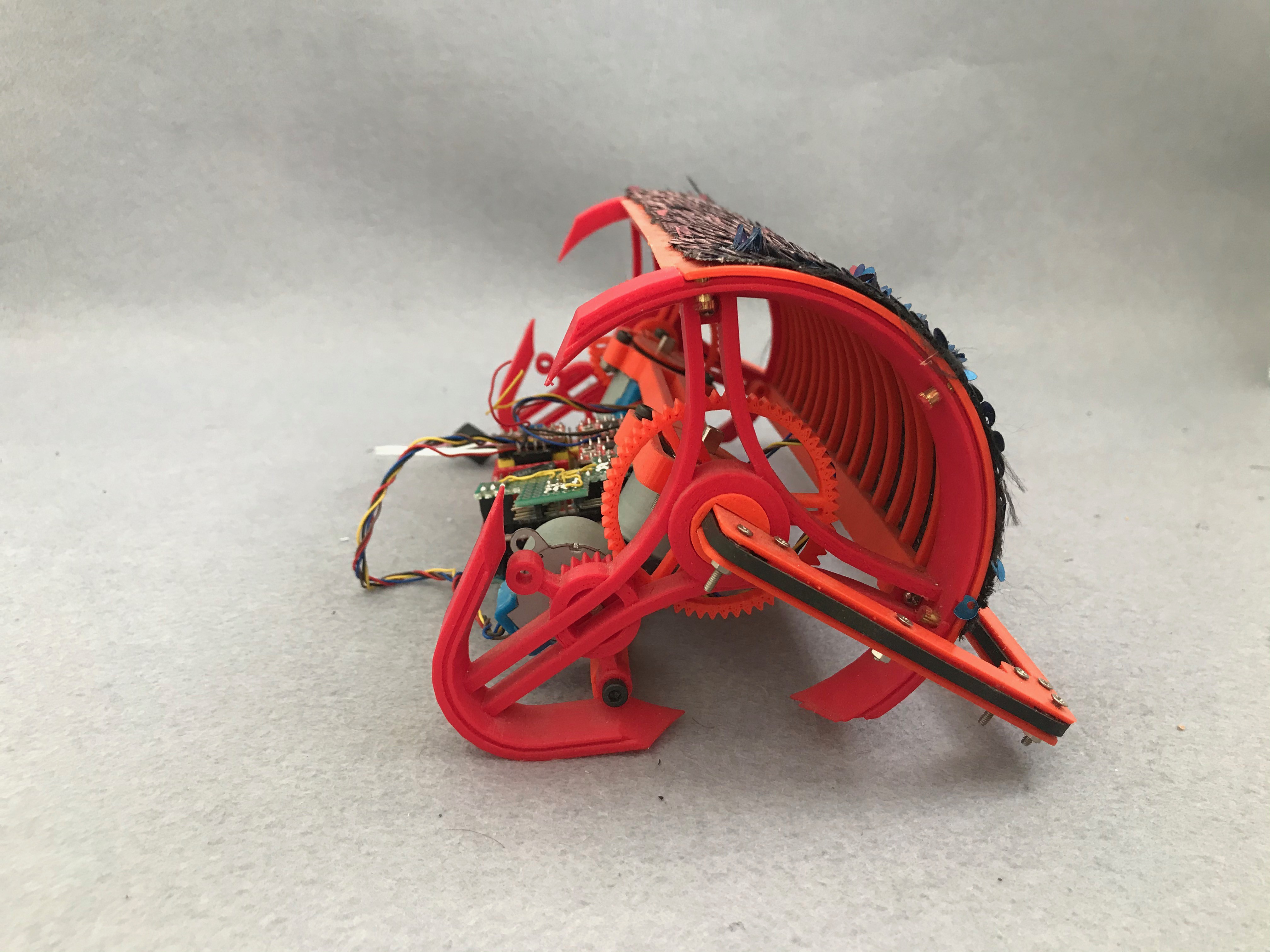
prototype #2
01/25/2020 at 11:24 • 0 commentsthis one i redesigned again ground up to make it more cleaner. the y axis is now a hubless axis which moves in a contained outer ring. The y-axis homes to a hall sensor on the back side and the x-axis homes to a optical sensor on the right side with the help of a white mark on the rubber belt. The pen homing is very tricky. After a lot of trial and error i found a way out by first homing the x-axis , then backing up a bit and then homing the pen at a known belt mark to a sensor on the left side of the clock and then finally moving a fixed distance to zero it. This is not perfect as it sometimes overshoots the mark , but a error of 1mm on the pen is ok in this case.
![]()
![]()
![]()
-
prototype 0.5 and 1
01/25/2020 at 11:12 • 0 commentsthe first two prototype was just figuring out the frame and kinematics . I didnt want the the pen to have any kind of ugly wires hanging outside which would be the case had i used a normal solenoid or a servo to lift the pen. To avoid that i used a h-bot mechanism to drive the x axis and the pen.
![]()
![]()
![]()