0%
0%
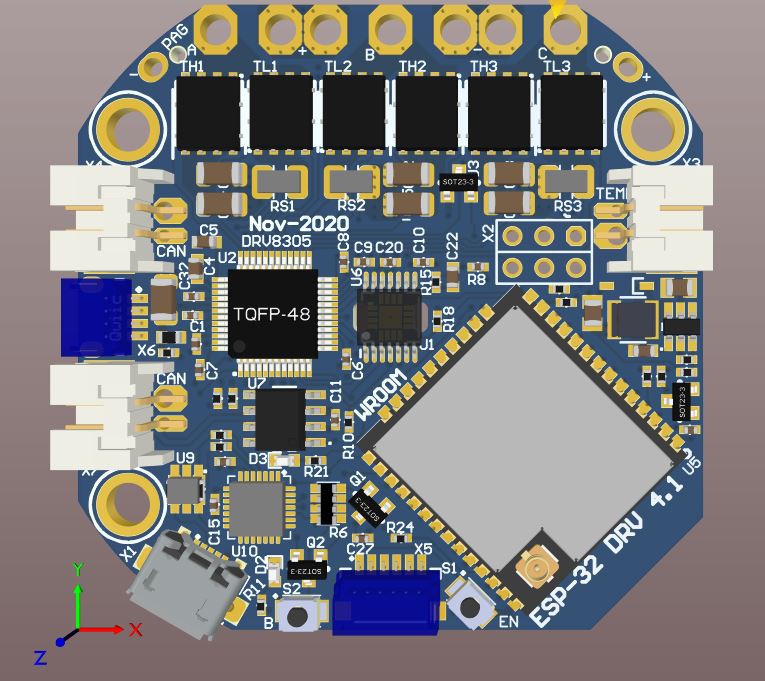
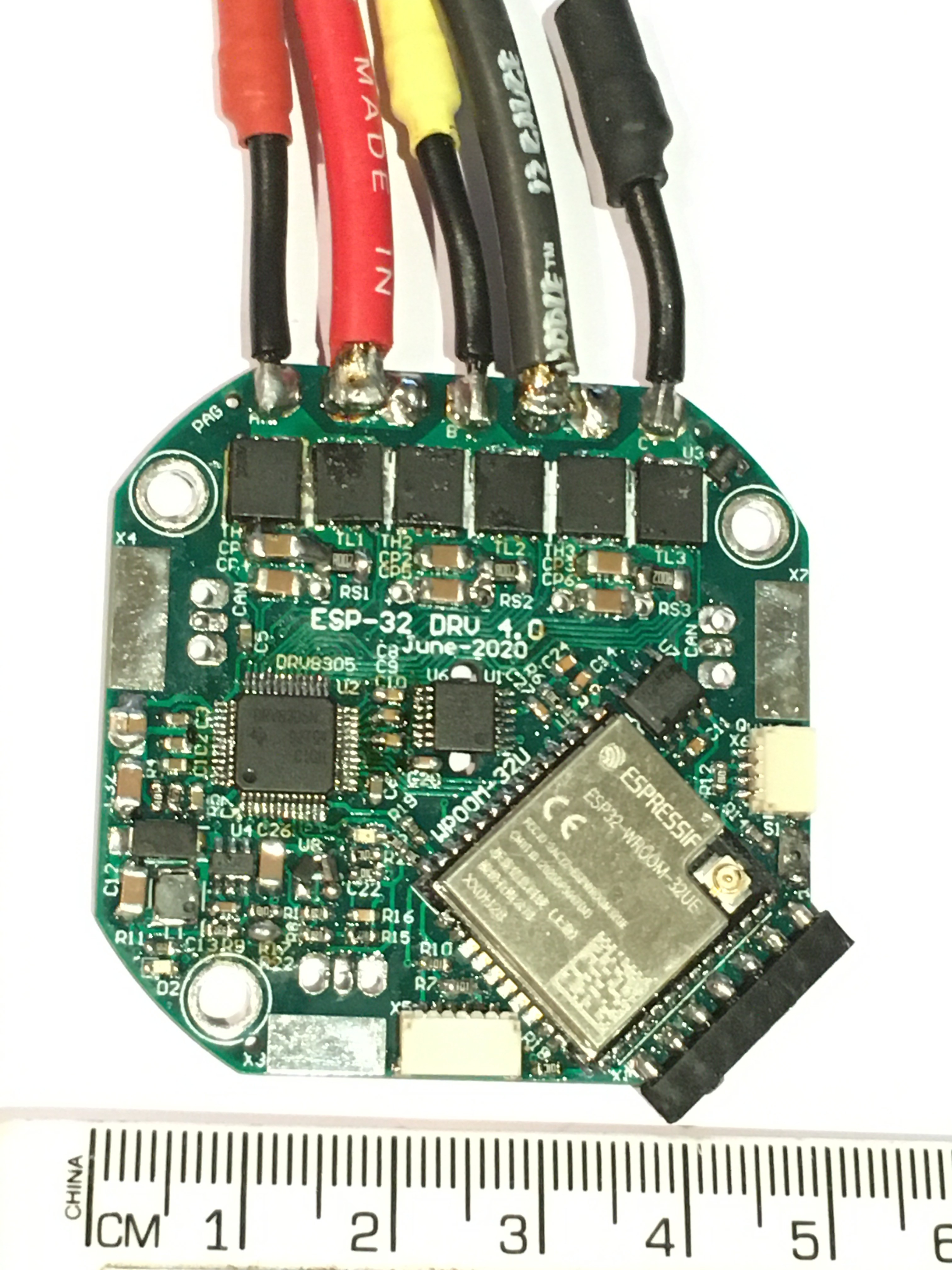
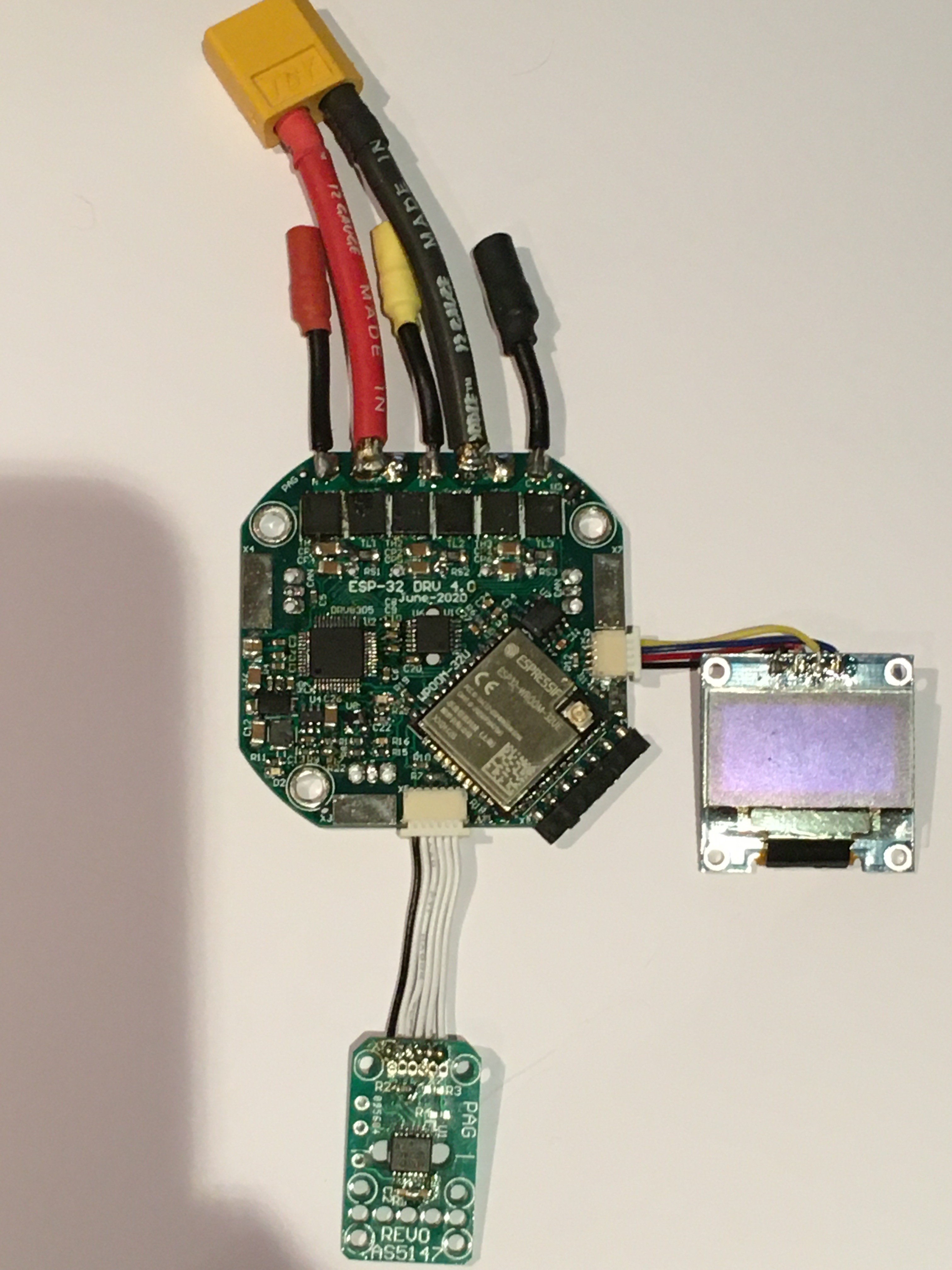
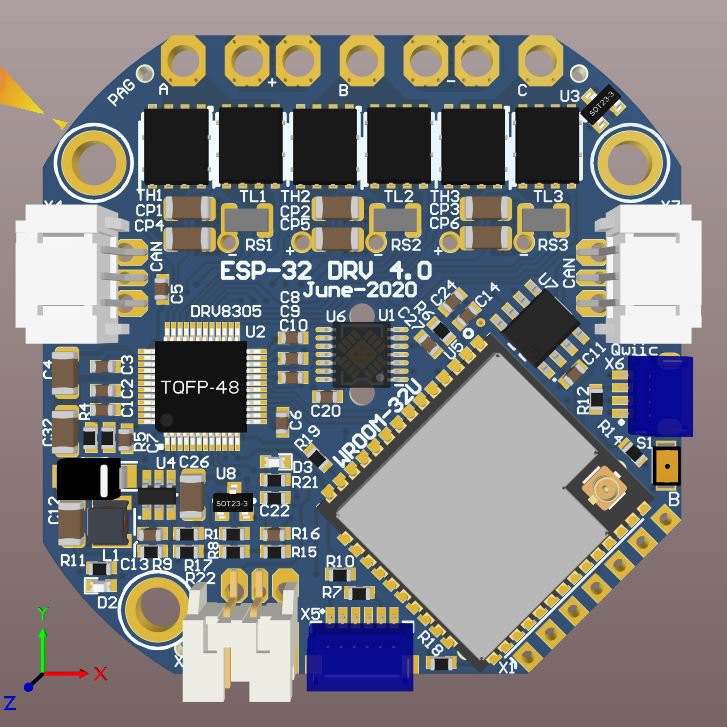
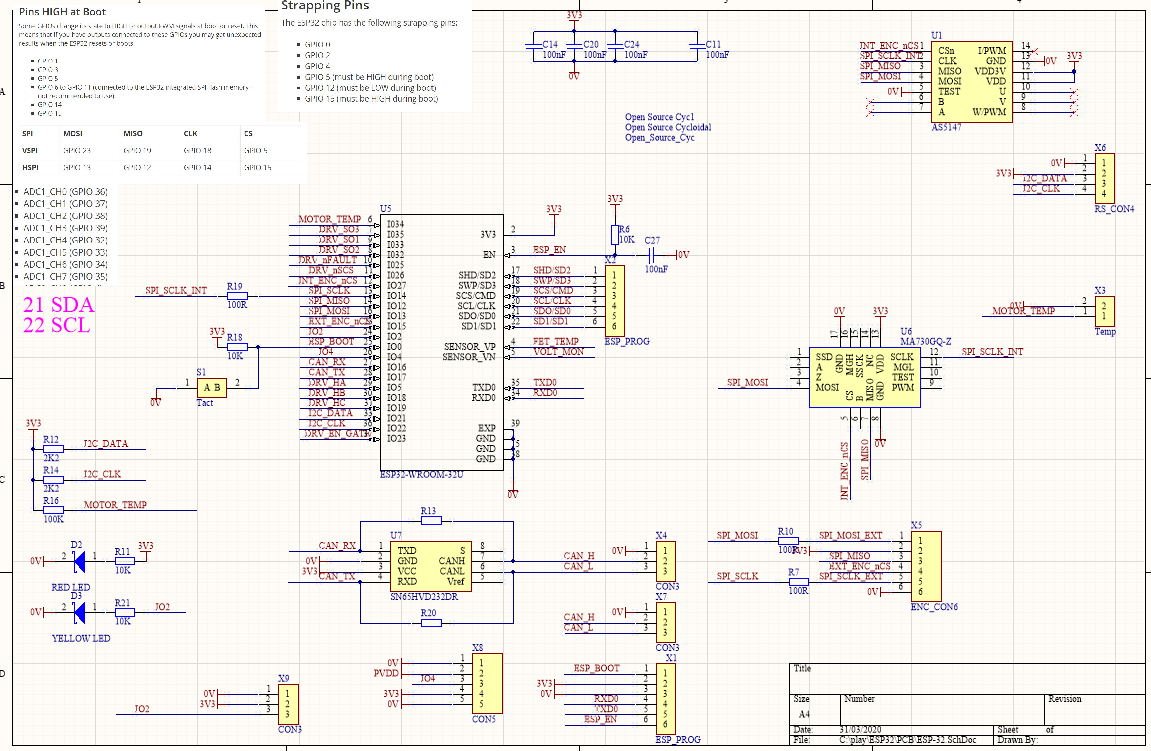
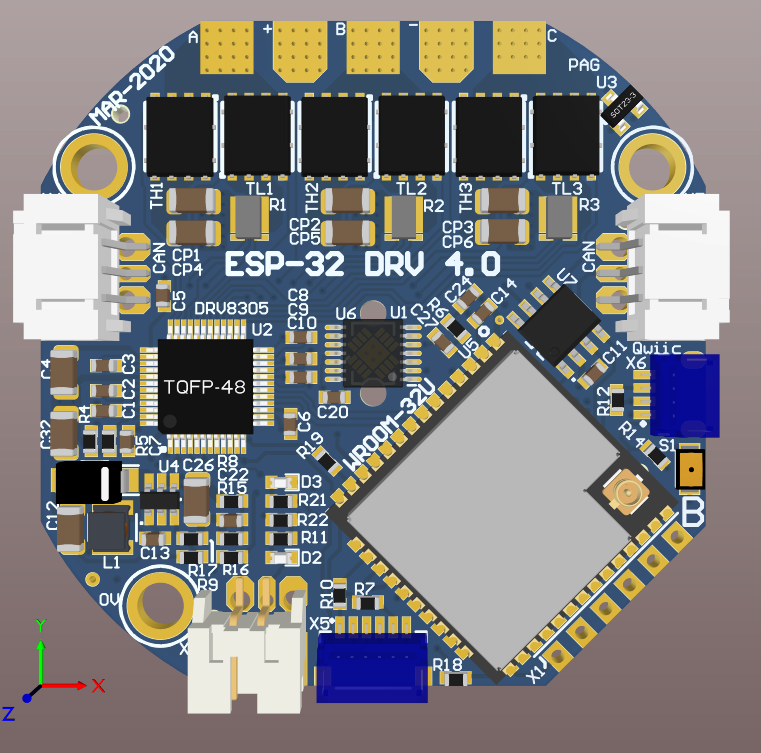
ESP-32 BLDC Robot Actuator Controller
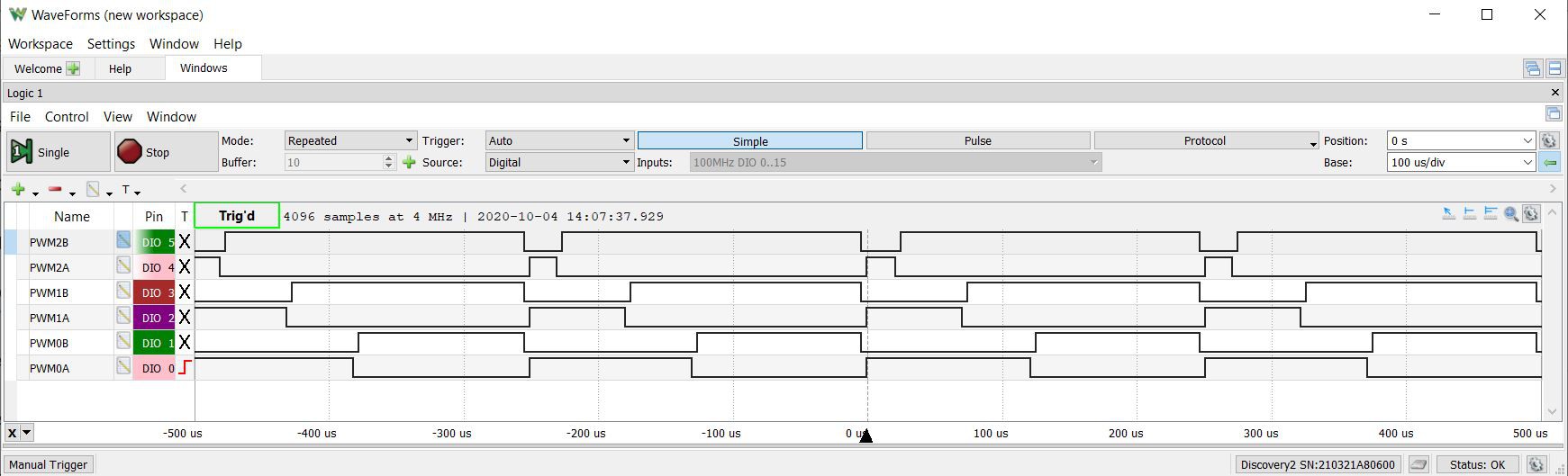
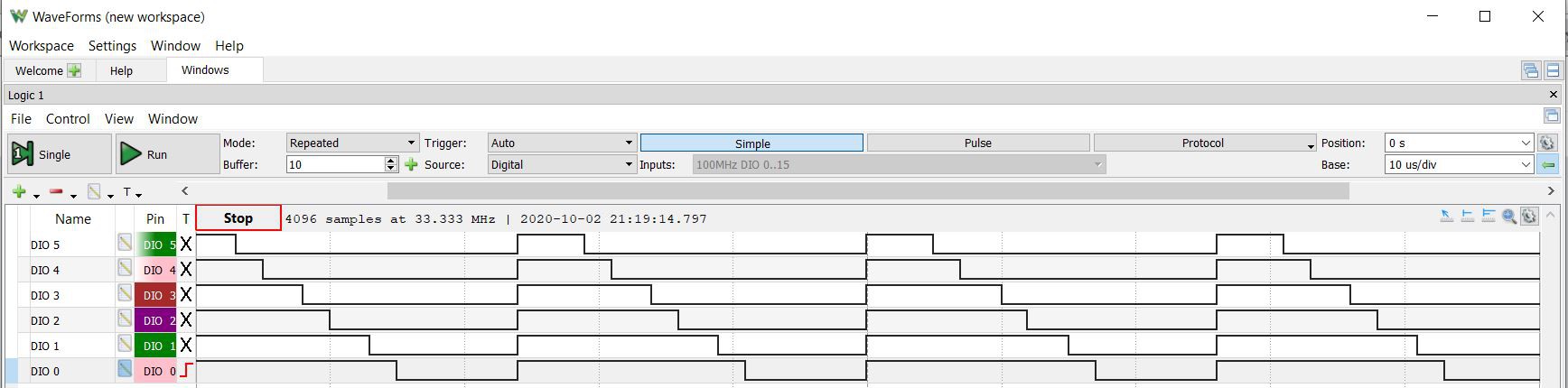
ESP-32 WROOM-32D has Three phase Centre Aligned MC-PWM, Dual SPI, I2C, 2MHz ADC, UART and CAN. Enough for a controller.
 Paul Gould
Paul GouldBecome a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests













 jlbrian7
jlbrian7

 silver2row
silver2row
 agp.cooper
agp.cooper
Hello, look great but i can not compile the code for the esp32. Is there a source for mcpwm.h file I got these error:
MCPWM_SELECT_SYNC_INT0' was not declared in this scope
Are there any sugestions ?