engineerkid1
engineerkid1Working -
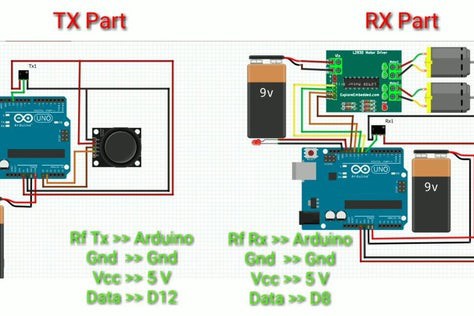
The working of this project is quite straight forward. The Joystick module gives analog values for the X and Y axis movement. This values are then compared with the set values by the help of various if else statements. And according to that a character is sent to the receiver. Like in this case a character 'a' is sent for forward movement of the robot.
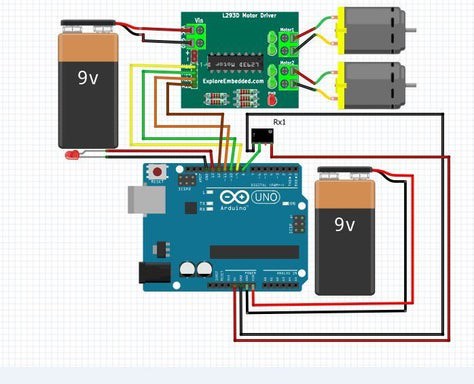
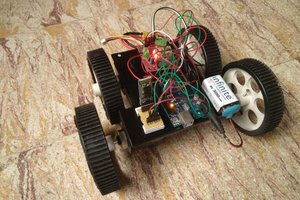
These characters are then received by the Rf receiver at the other end. The receiver's job is to just receive the character and send it to the Arduino. The Arduino then moves the robot according to the sent character. The movement is controlled by the L293d Motor driver module. This is the basic working of the project. Now let's head on to build this robot.
 Jithin Sanal
Jithin Sanal

 vishal soni
vishal soni