wombatics
wombaticsWombatics SAM01 mainboard is built for projects which need to work with mobile app, servos and motion tracking in mind. With onboard Bluetooth Low Energy (BLE) module, it is compatible with both Android and iOS.
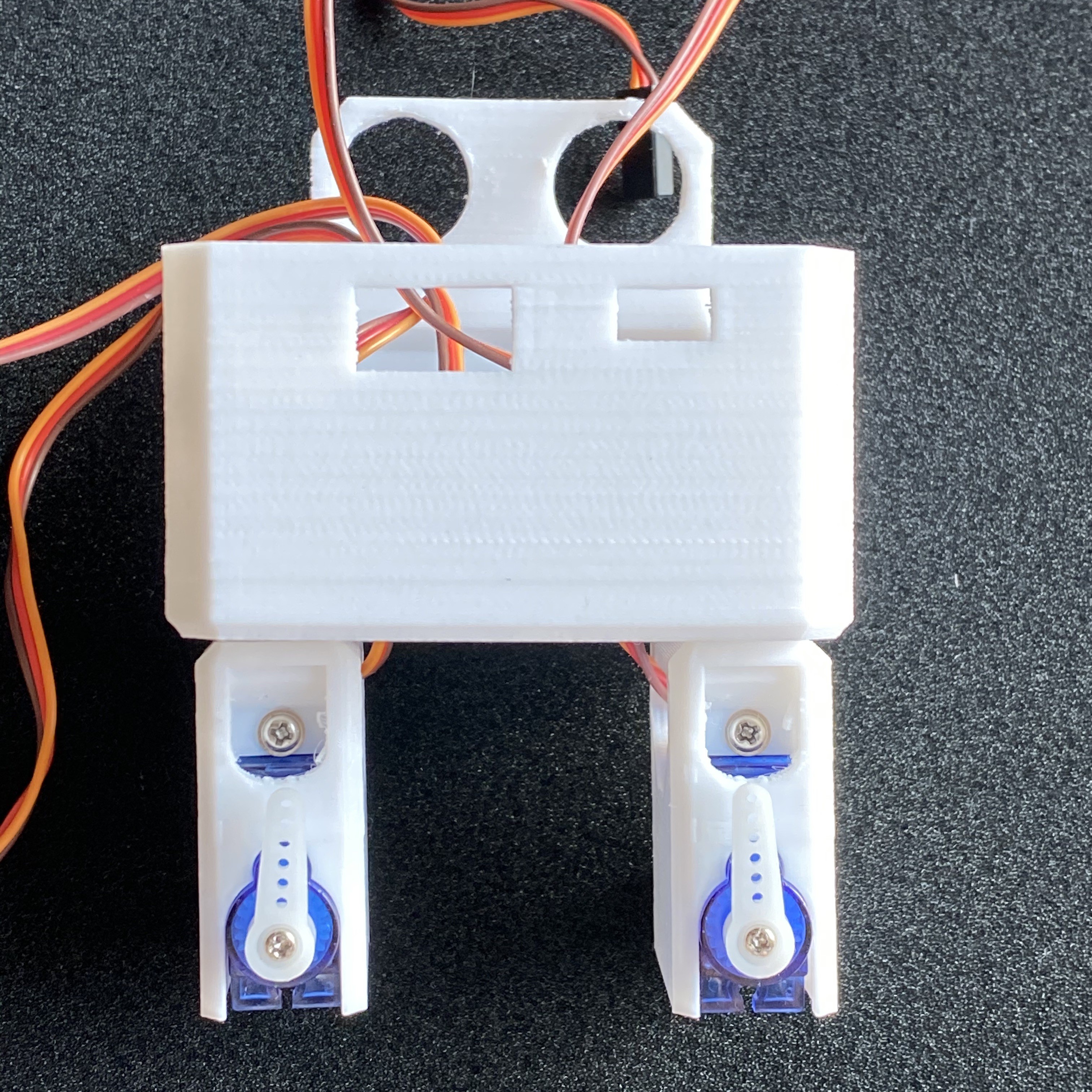
It is ideal for building your own robot such as Otto.
This project is a remix of Otto with Wombatics mainboard.
More details of Wombatics board.





 serdef
serdef