0%
0%
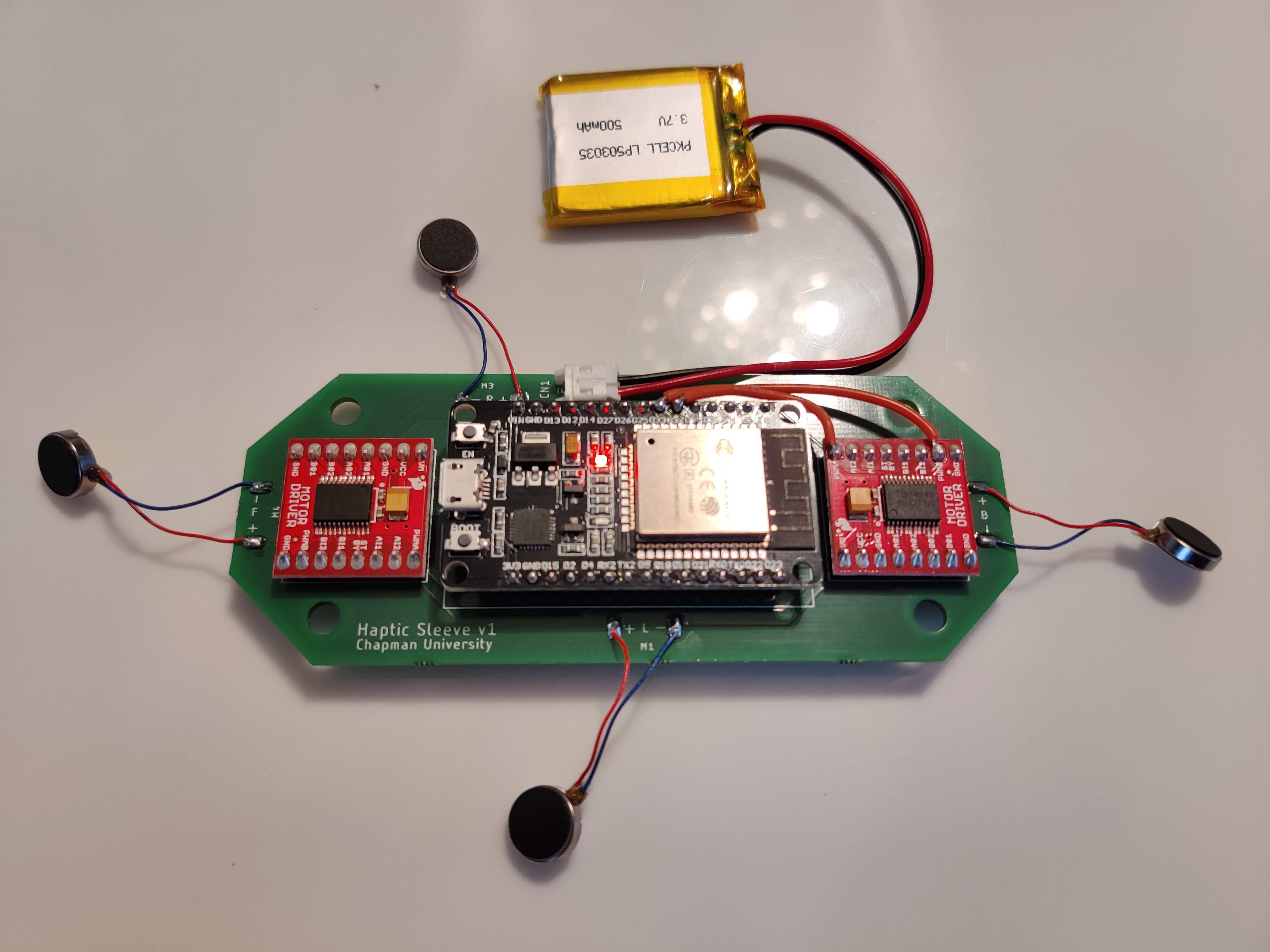
Haptic Sleeve
Sleeve worn on the arm to provide haptic feedback while performing handwriting exercises.
 Grant Stankaitis
Grant StankaitisBecome a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests
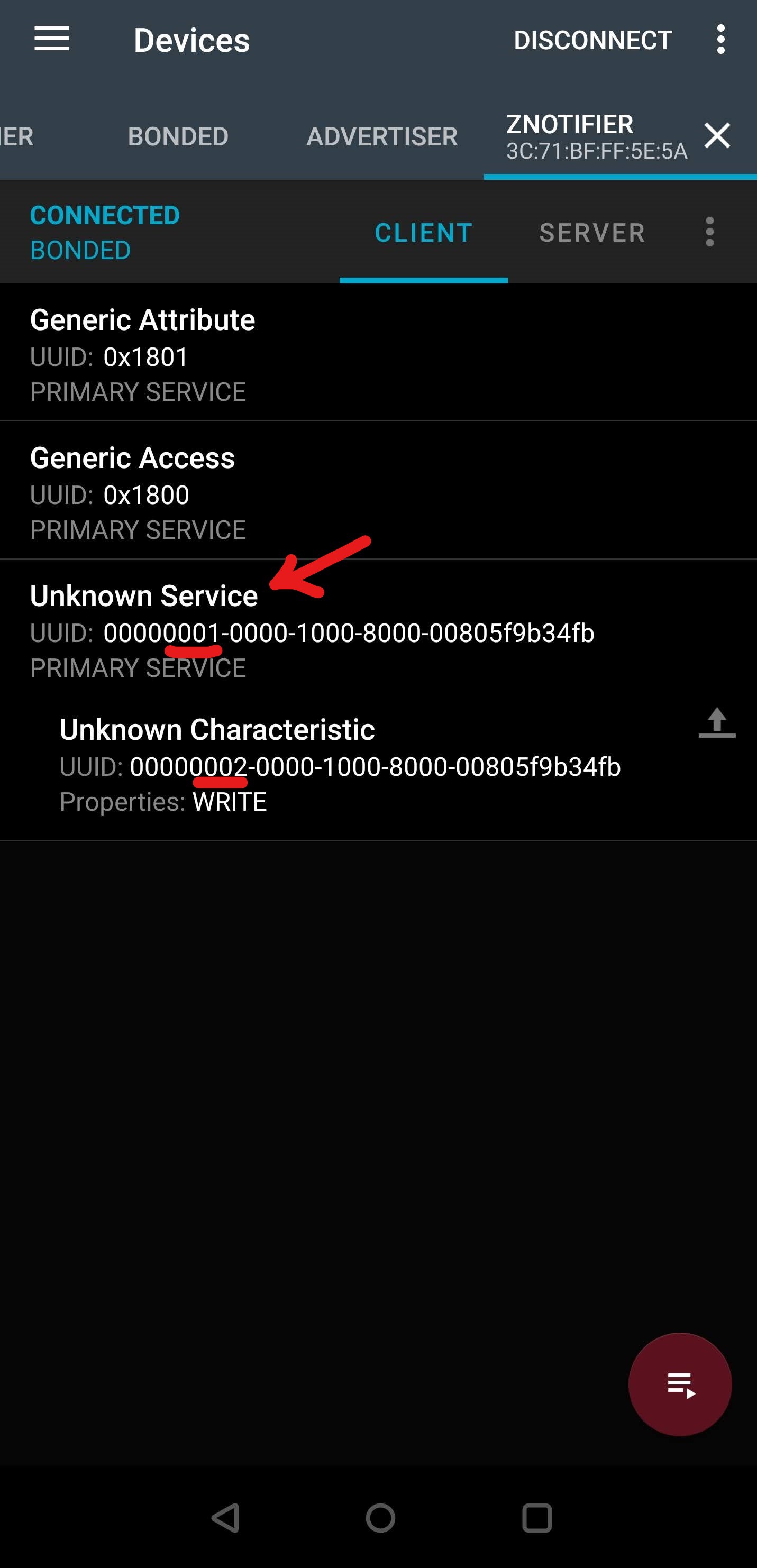
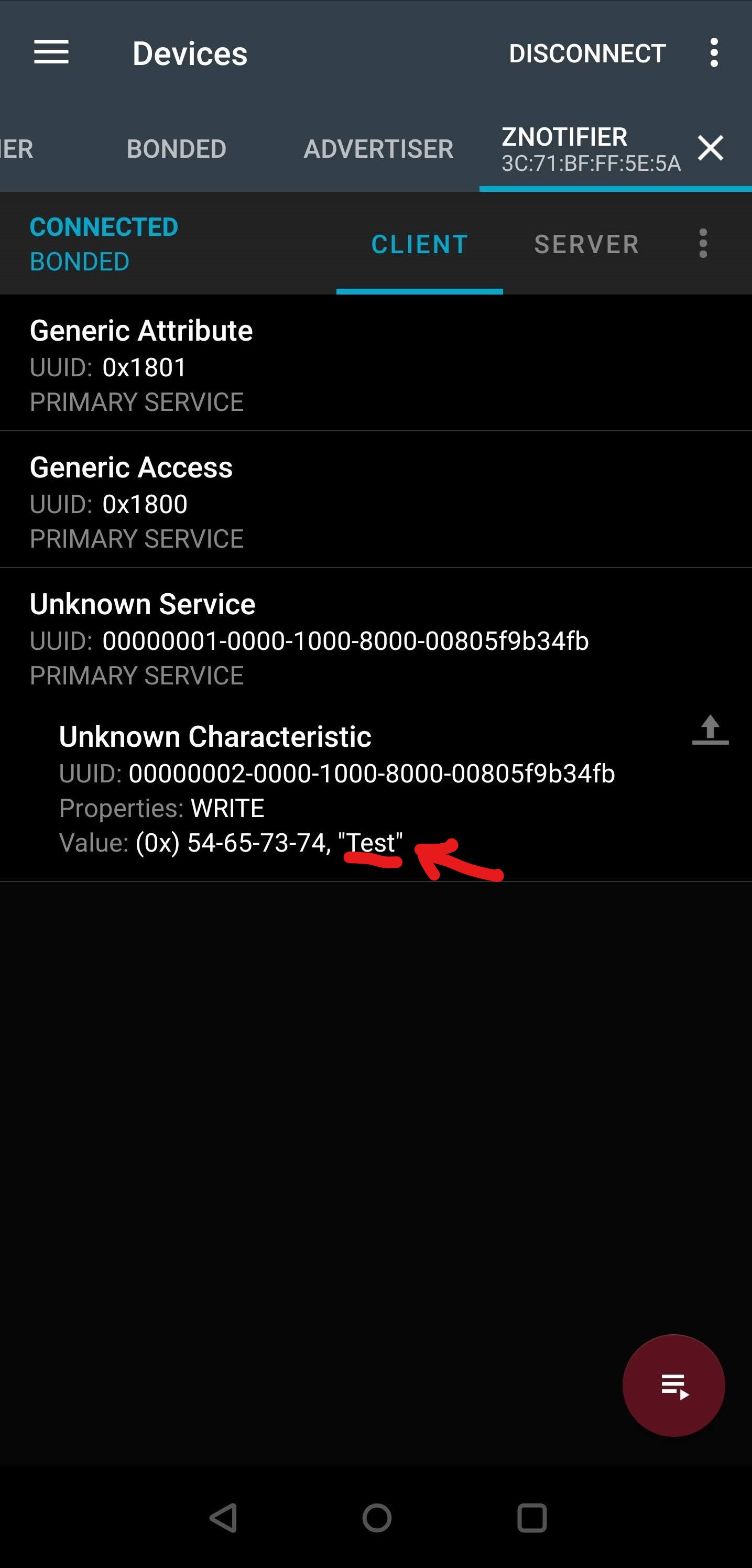

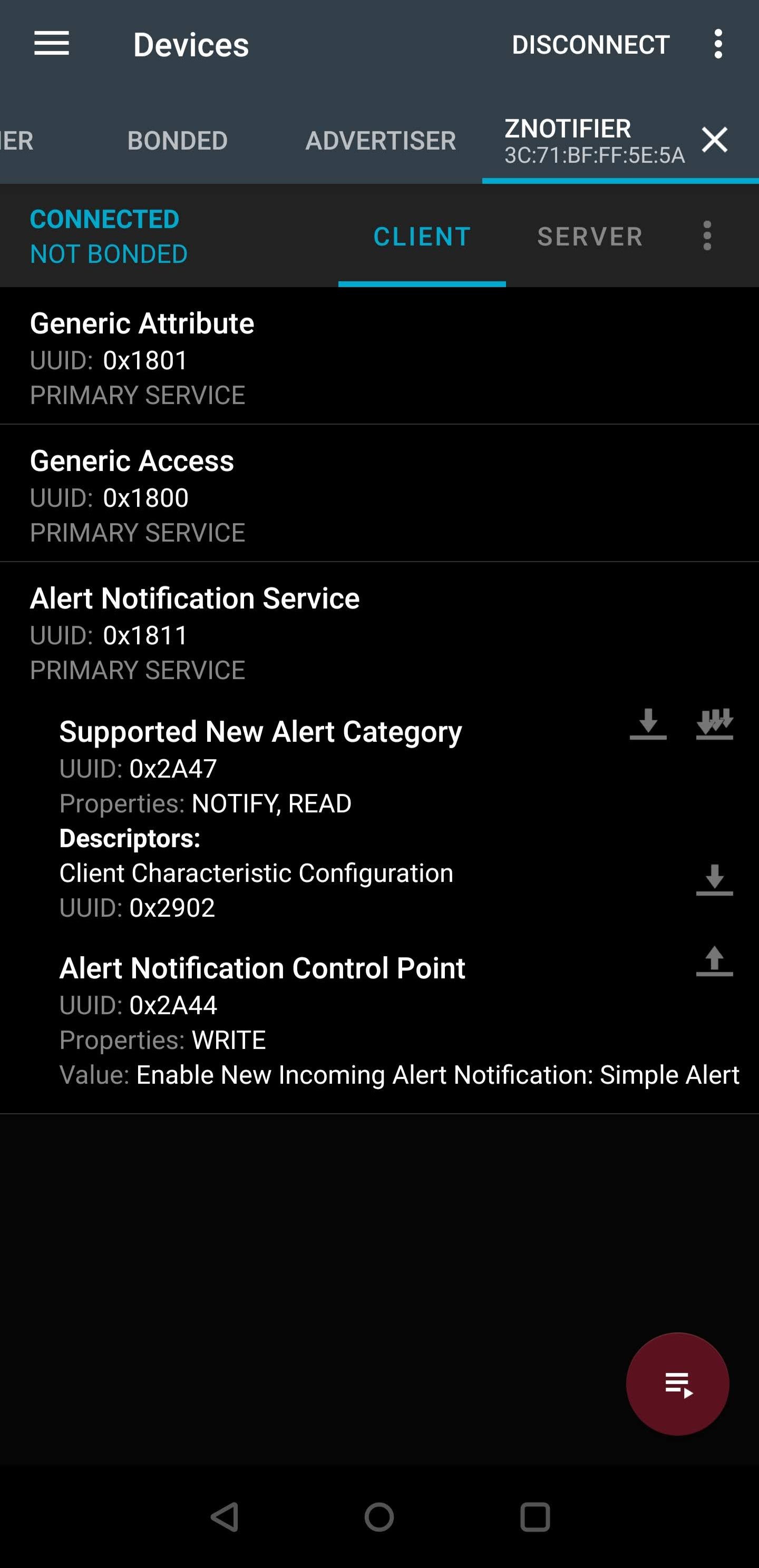
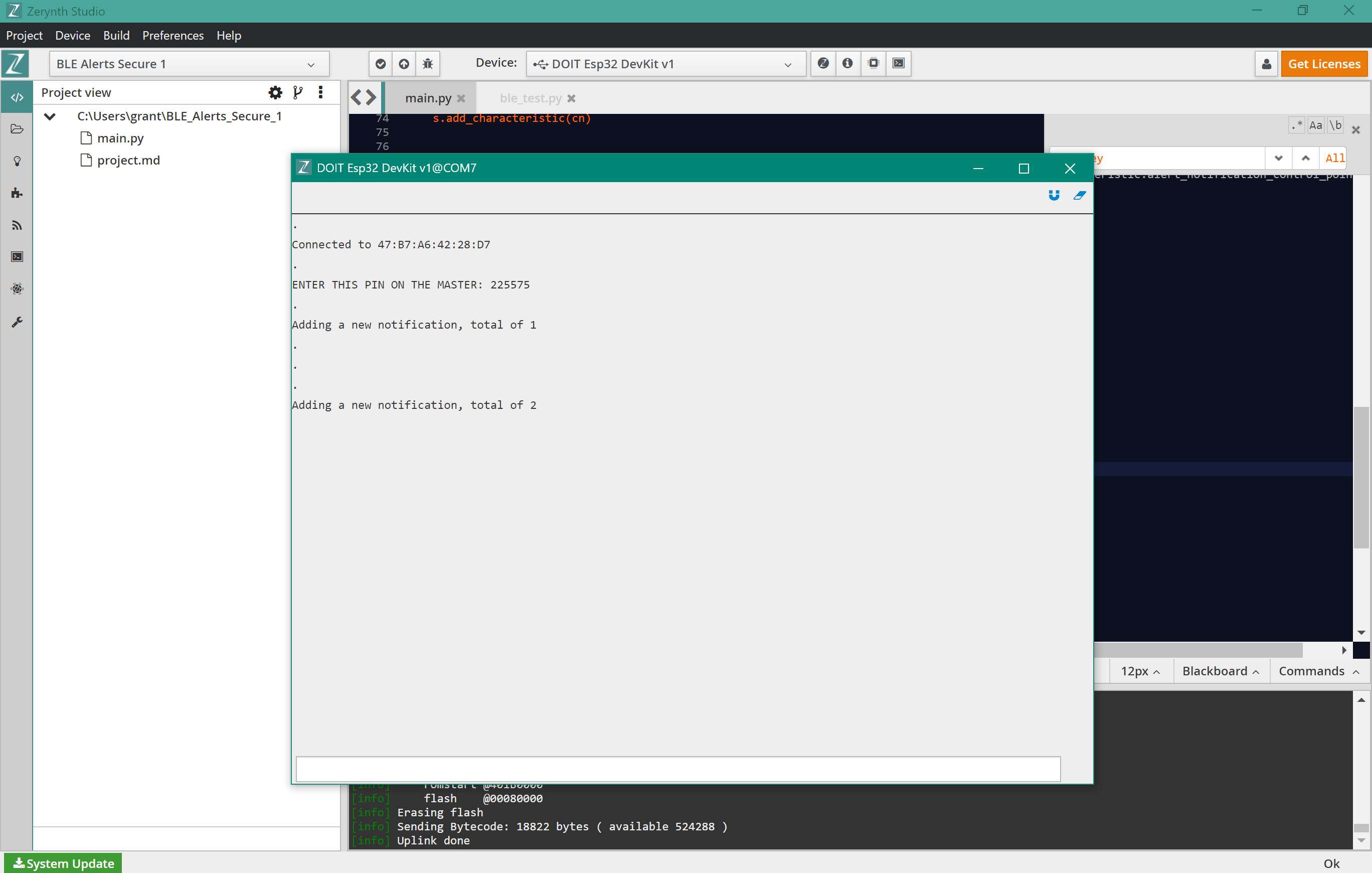
 Here are the links for the Bluetooth documentation for
Here are the links for the Bluetooth documentation for 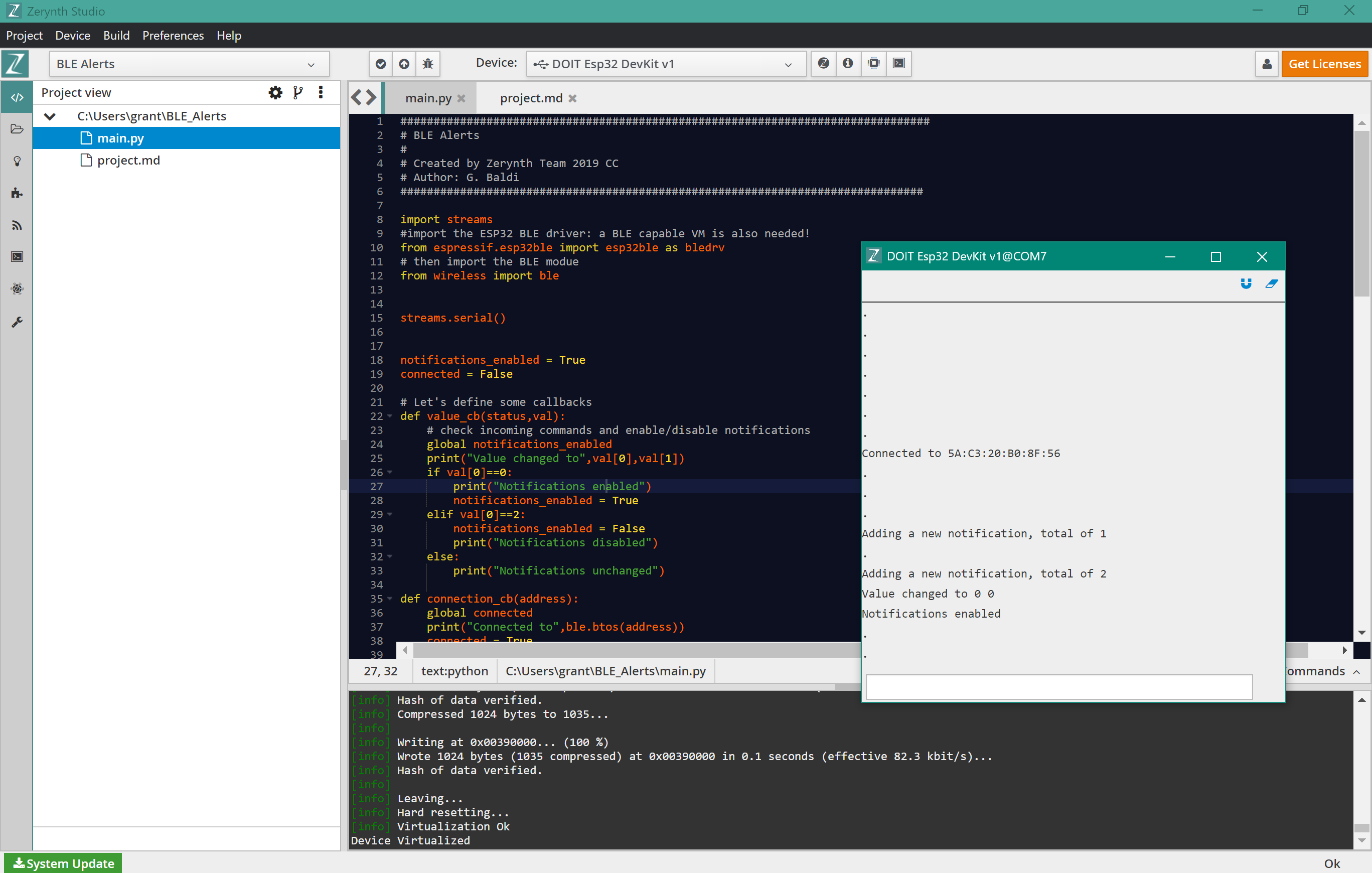



 shane.snipe
shane.snipe
 Matthew James Bellafaire
Matthew James Bellafaire
Interesting idea. My handwriting has gone way down in legibility over the years thanks to keyboards.