 Pengu MC
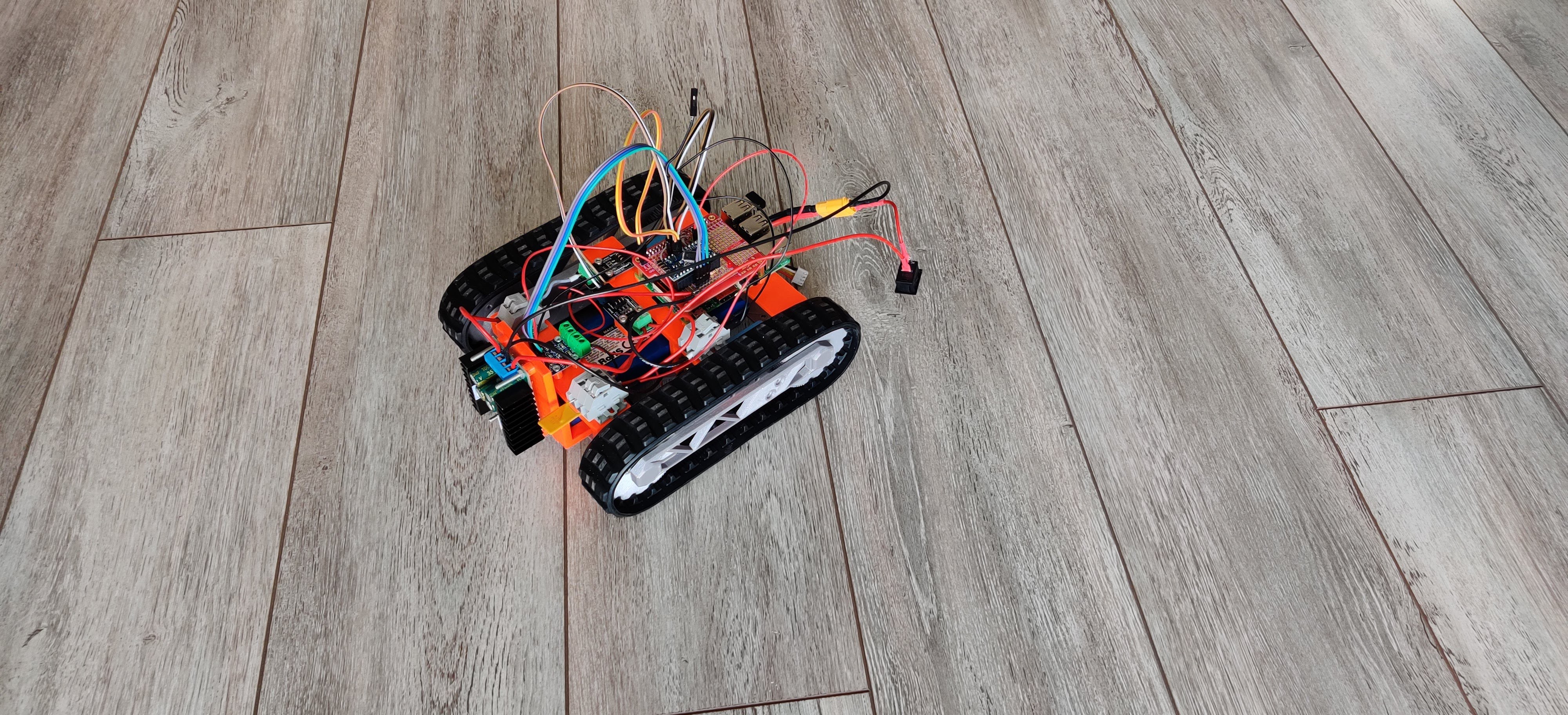
Pengu MCI've got around to soldering the pi-hat board. So now there's a atmega328p on top of the PI. It can be programmed by the pi via SPI.
The atmega controls the motor driver and monitors the battery voltage and the outputs of the current sensors. Communication with the PI is done via I2C (SMBus)
I wrote a quick and dirty python program to control the whole thing via wireless keyboard so I could have a little test drive:
video:
The noise is actually quite loud, slightly softer than a robot vacuum.
Cable management is something for later :D
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.